科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2018-11-20
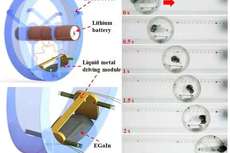
柔性机器人是一个新兴领域,从机械学、物理学到生物学,都已获得越来越广泛的关注。然而具有刚性对应物的传统材料很难实现灵活地转变为多种形态。镓基液态合金具有优异的导热性和导电性、低粘度、良好的流动性和生物相容性,在先前的研究中,其展现出了在外加电场和牺牲金属的刺激下产生变形和运动的能力,在柔性机器人领域被寄予厚望。
镓基合金一直以银白色的金属光泽示人。近日,中国科学院理化技术研究所研究报道了液态金属表面在牺牲金属或电场的刺激下可产生变色现象,使得液态金属具备了类似章鱼等头足纲动物的柔软、可变形变色的特点。研究表明,镓基液态金属的变色是由于其表面产生了百纳米厚的三氧化二镓介孔薄膜,其色彩来源有干涉和散射两种形式(图1)。当放置在石墨基底上并与电解质溶液中的铝箔混合时,由于三氧化二镓薄膜的瑞利散射和薄膜-金属界面出现的微纳米空腔,液态金属表面上出现银白色到金色最后到黑暗的颜色变化。而在电场的调节下,薄膜的上下表面光滑,入射光发生薄膜干涉,使得液态金属表面可以出现类彩虹色的分布。此结果为开发具有智能伪装功能的柔性机器人的设计提供了重要思路(图2)。
该研究由理化所研究员饶伟和宋恺合作,成果已发表于ACS Applied Materials & Interfaces 期刊,论文标题为Coloration of Liquid-Metal Soft Robots: From Silver-white to Iridescent。论文第一作者为中国科学院大学未来技术学院液态金属教研室直博研究生后仪和北京建筑大学联合培养研究生常皓。
相关工作得到国家自然科学青年基金及重点基金、北京市科委重大专项的大力支持。
文章链接
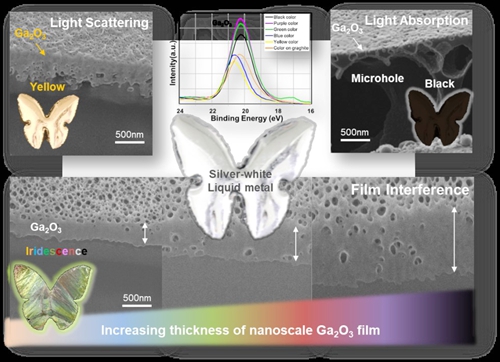
图1 液态金属结构色及其变色原理
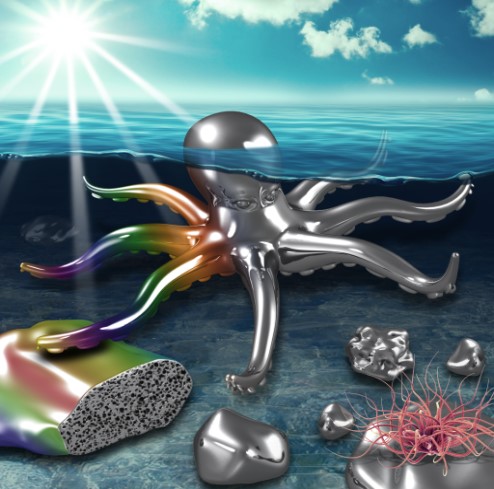
图2 液态金属可伪装变色的柔性机器人展示
来源:中国科学院
原文链接:http://www.cas.cn/syky/201811/t20181120_4671462.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
第九届湖南省青少年机器人竞赛在株洲举行


液态金属驱动机器人研究取得进展
1800余名选手参加南通市教育机器人竞赛


“制造业转型升级”论坛在深圳举行
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况

科幻变现实?液态游动金属纳米机器人用于癌症主动联合治疗|哈工业大贺强团队新进展
顺德区数控机械创新应用示范工程及自动化技术交流会召开
马林看望第十七届青少年机器人竞赛北京队参赛师生



我学者构建液态金属磁性微型软体机器人 可用于临床医学

可重构的活性液态金属游动纳米机器人集群


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号