科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-02-24
来源:中国高科技
由俄罗斯神经科学家伊万·彼德罗维奇·巴甫洛夫(Ivan Petrovich Pavlov)以狗为模式动物发现并建立的条件反射理论,是生物系统学习理论的重要基础之一。经典条件反射在生物大脑学习中起着重要作用,也为人工智能学习理论的研究提供了具备生物可行性的机制与基础。近40年来,脑与神经科学及人工智能的研究者通过神经科学实验与计算建模研究的融合,试图研究和揭示经典条件反射实验的神经计算机制并应用于人工智能。然而,这些模型只能复现和解释相对有限的经典条件反射实验。
中国科学院科学家团队——自动化研究所类脑智能研究中心研究员曾毅团队融合生物学、神经科学等学科在条件反射领域的已有成果,依据条件反射的神经基础,即所涉脑区、神经环路、认知功能、神经元尺度的机理与计算机制,提出类脑经典条件反射脉冲神经网络模型(图1)。该模型将在条件反射领域达成共识的生物学研究结果整合到一个类脑脉冲神经网络中。相较于其他计算模型,类脑经典条件反射模型可以复现神经科学中提出的15种经典条件反射实验,并从计算角度给予合理解释,有助于揭示生物体建立条件反射的神经机制。此外,该模型可以部署到机器人上,使机器人可像生物体一样表现出类脑经典条件反射行为(图2)。经实验验证,该模型可使机器人具备速度泛化的能力(图3),即在导航任务中,在较低速度下,机器人通过条件反射习得运动轨迹,在较高速度下,不需要再次训练即可完成导航任务。
相关研究成果以Brain-Inspired Classical Conditioning Model为题,发表在Cell Press出版社旗下iScience上。曾毅为论文通讯作者,工程师赵宇轩、研究生乔广参与研究。研究工作得到中科院战略性先导科技专项、科学技术部和北京市科学技术委员会等的资助。
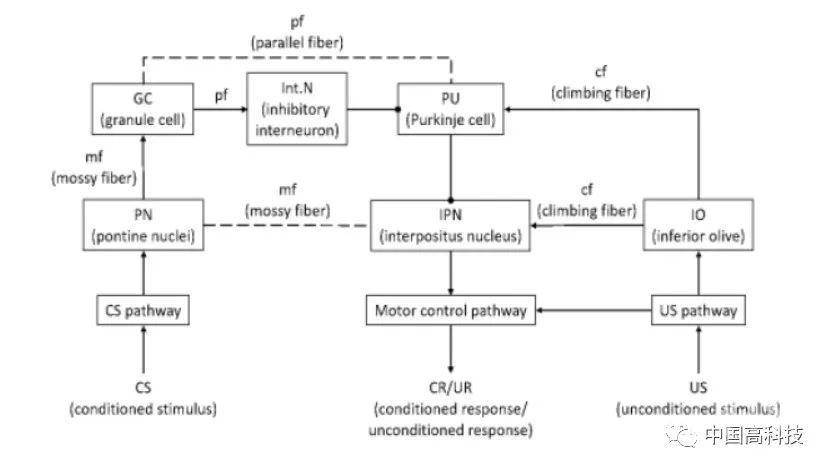
图1.类脑经典条件反射脉冲神经网络计算模型
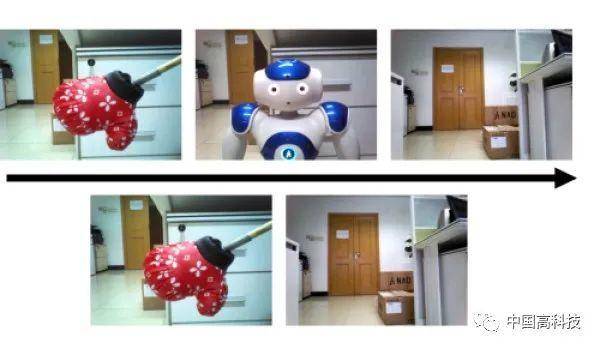 图2.基于类脑经典条件反射脉冲神经网络模型的机器人习得-消退-再习得实验
图2.基于类脑经典条件反射脉冲神经网络模型的机器人习得-消退-再习得实验
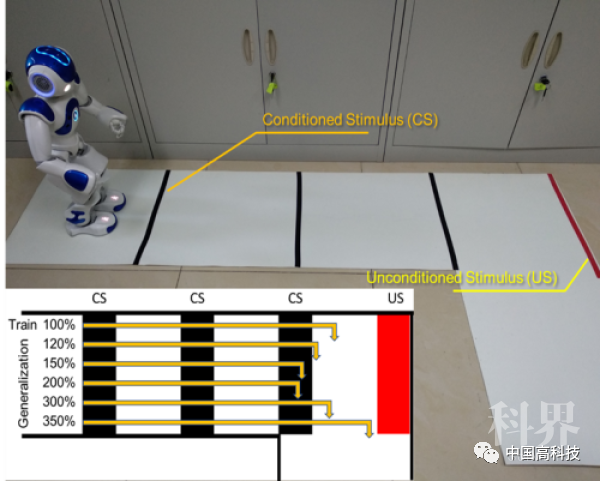 图3.基于类脑经典条件反射脉冲神经网络模型的机器人速度泛化实验
图3.基于类脑经典条件反射脉冲神经网络模型的机器人速度泛化实验
原文链接:http://mp.weixin.qq.com/s?__biz=MzA3MDczMTAzMA==&mid=2650053754&idx=2&sn=b0239aa46ec63dbeb857252892589b0b
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
随机神经网络
细胞式类神经网络

如何入手卷积神经网络
单隐藏层神经网络
顺德区数控机械创新应用示范工程及自动化技术交流会召开

类脑认知计算团队提出类脑经典条件反射学习模型
神经网络传输协议
马林看望第十七届青少年机器人竞赛北京队参赛师生



微型神经网络

神经网络正则变换


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号