科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-04-03
内容来源:中国科学院
精确控制液滴行为是冷却降温、防结冰、微流控等应用领域的关键。当前研究主要集中于单一液滴移动行为,此时仅需使液滴的驱动力大于其移动时受到的固定阻力。调节液滴所受驱动力及阻力的相对大小,实现复杂的液滴行为,仍然面临严峻挑战。
在国家自然科学基金委、科技部和中国科学院的支持下,中科院化学研究所绿色印刷重点实验室宋延林课题组近年来致力于纳米绿色印刷技术的研究和应用,在喷墨打印墨滴控制和功能界面操控液滴行为领域取得一系列进展。
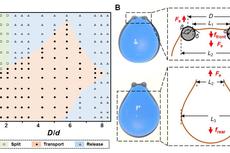
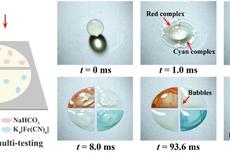
最近,他们设计出一种能够程序化控制的“液滴机器人”,首次实现了液滴的切割、移动、释放和旋转等复杂行为。该机器人由磁场控制系统和两个不锈钢组成。通过程序化控制磁场分布,可以改变钢球的位置和球心距,从而动态调节液滴运动时前后端受到的阻力大小,实现液滴的多行为控制。对钢球进行表面处理,调节其表面能,可用于多种类流体系统的操控。比如,在水下控制油滴,在油下控制水滴和水下控制气泡等。这种液滴控制技术在化学分析和生物医学等领域具有广泛的潜在应用前景。
相关研究成果发表在Science Advances杂志(Sci. Adv., 2020, 6, eaay5808),通讯作者是研究员宋延林和博士李会增,第一作者是博士生李安。
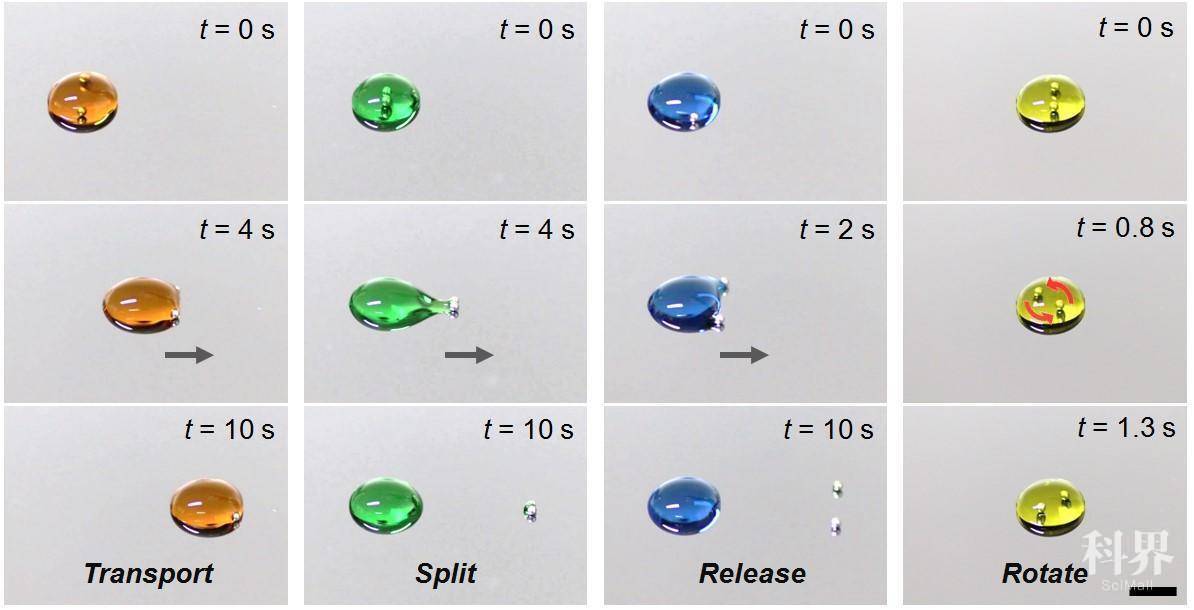
液滴的多种行为控制
来源:中国科学院
原文链接:http://www.cas.cn/syky/202004/t20200403_4739754.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
宋延林Science Advances:磁驱动装置用于可编程液滴操控

人机协作的最新演进方向与前景展望
【对话科学家】宋延林(下):加强自主创新

中国首次承担核工业国际标准化组织机构职责并担任重要席位

中科院化学所宋延林研究员团队:在连续单墨滴3D打印领域中取得新进展

【年会系列-环境监测专委会】生态环境监测创新技术与应用分会成功举办

宋延林、蒋兴宇获2015亚洲化学学会联合会(FACS)奖

中科院化学所宋延林团队研发新技术在世界印刷领域全面领先
化学所宋延林课题组利用液滴自切割实现复杂样品分析

刘鹤出席2018世界机器人大会开幕式并讲话


科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号