科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-05-24
来源:高分子科学前沿
在人类皮肤内的缓慢适应(SA)受体中,SA-I(Merkel cell)和SA-II(Ruffini organ)在顺应性感觉中起关键作用。前者以高分辨率测量施加在皮肤上的静压,而后者则能够检测皮肤的伸展。随着可拉伸材料和微细加工技术的发展,报道了能够检测温度以及静态和动态力的柔性传感器。由于顺应性传感器是一种重要的感测块,因此需要对其进行开发并将其集成到人造皮肤上,以为假肢或机器人系统提供类似人的感觉。然而,已有的四种传感机制(转换为数字读取的电信号)的传感器外部组件(精密光学测量组件等)体积庞大,因此将这些传感器用于需求紧凑的外形尺寸的应用中仍然面临着巨大的挑战。此外,顺应性传感设备复杂是因为其需要同时测量施加的压力和变形信息两个参数以检测物体的顺应性。在没有耦合效应的情况下,将压力和应变传感器集成也是一项挑战。如要开发可集成到人造皮肤或机器人系统中的顺从性传感器,则需要满足以下要求:1)应该具有易于集成的紧凑型尺寸;2)不需要大型外部组件或集成系统中的重大结构更改;3)传感器应该具有解耦可靠性能。 基于此,斯坦福大学的鲍哲南教授(通讯作者)团队报道了一种仿生的、薄顺应性传感器。利用该传感器可同时检测人体皮肤中类似于SA-I和SA-II的压力和应变,而无需任何笨重的外部组件且不会占用相当大的体积。为了模拟SA-I和SA-II的拉伸和压力感应能力,研究人员将基于薄膜的应变传感器(MBSS)耦合到压力传感器,以识别接触的材料。实验结果证实,该混合传感器可以同时捕获所接触材料的表面变形和所施加的压力。通过利用基于电阻和电容的传感器,研究人员为MBSS开发了两种不同的传感方法。例如,当分别测试模量为75 GPa和20 kPa的材料时,电阻传感器的灵敏度为11 Ω/N和104 Ω/ N。同样,对于类似材料,电容式传感器的灵敏度分别为80 fF/N(femtofarad Newton)和1280 fF/N。同时,还展示了通过减小薄膜的厚度可以调节传感器的灵敏度,尤其是需要更高的分辨率时。此外,传感器的薄型和小尺寸使其能够应用于不同的应用中。首先,将传感器集成到机械手的手指上,并能确定抓握物体的顺应性。其次,通过构建阵列传感器能够绘制出由不同材料制成的物体的表面图,对于检测组织内部的不规则物体(如肿瘤)非常有用。
基于此,斯坦福大学的鲍哲南教授(通讯作者)团队报道了一种仿生的、薄顺应性传感器。利用该传感器可同时检测人体皮肤中类似于SA-I和SA-II的压力和应变,而无需任何笨重的外部组件且不会占用相当大的体积。为了模拟SA-I和SA-II的拉伸和压力感应能力,研究人员将基于薄膜的应变传感器(MBSS)耦合到压力传感器,以识别接触的材料。实验结果证实,该混合传感器可以同时捕获所接触材料的表面变形和所施加的压力。通过利用基于电阻和电容的传感器,研究人员为MBSS开发了两种不同的传感方法。例如,当分别测试模量为75 GPa和20 kPa的材料时,电阻传感器的灵敏度为11 Ω/N和104 Ω/ N。同样,对于类似材料,电容式传感器的灵敏度分别为80 fF/N(femtofarad Newton)和1280 fF/N。同时,还展示了通过减小薄膜的厚度可以调节传感器的灵敏度,尤其是需要更高的分辨率时。此外,传感器的薄型和小尺寸使其能够应用于不同的应用中。首先,将传感器集成到机械手的手指上,并能确定抓握物体的顺应性。其次,通过构建阵列传感器能够绘制出由不同材料制成的物体的表面图,对于检测组织内部的不规则物体(如肿瘤)非常有用。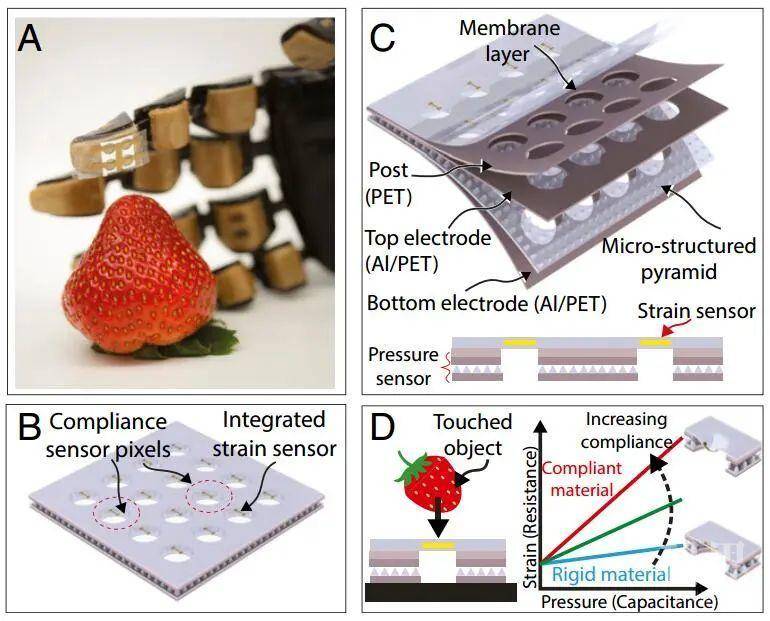 图1、检测材料的顺应性研究人员通过开发了有限元(FE)模型,以确定传感器的重要几何和材料特征以及对不同顺应性的材料的响应。当半径从0.5 mm增加到2 mm时,MBSS的挠度增加了4倍以上。通过将MBSS的模量从0.25 MPa变到2 MPa时,位移没有显着差异。当使用半径为1 mm且厚度为50 μm的聚二甲基硅氧烷(PDMS)薄膜识别模量为0.25和1 MPa的材料时,其灵敏度几乎提高了两倍,而10 MPa的材料对径向应变几乎没有响应。在小的变形状态中,变形的增加会增加薄膜的曲率,从而导致电容的增加。进一步使薄膜变形,电极之间的间隙由于拉伸而增大,并主导了曲率效应,电容开始减小。
图1、检测材料的顺应性研究人员通过开发了有限元(FE)模型,以确定传感器的重要几何和材料特征以及对不同顺应性的材料的响应。当半径从0.5 mm增加到2 mm时,MBSS的挠度增加了4倍以上。通过将MBSS的模量从0.25 MPa变到2 MPa时,位移没有显着差异。当使用半径为1 mm且厚度为50 μm的聚二甲基硅氧烷(PDMS)薄膜识别模量为0.25和1 MPa的材料时,其灵敏度几乎提高了两倍,而10 MPa的材料对径向应变几乎没有响应。在小的变形状态中,变形的增加会增加薄膜的曲率,从而导致电容的增加。进一步使薄膜变形,电极之间的间隙由于拉伸而增大,并主导了曲率效应,电容开始减小。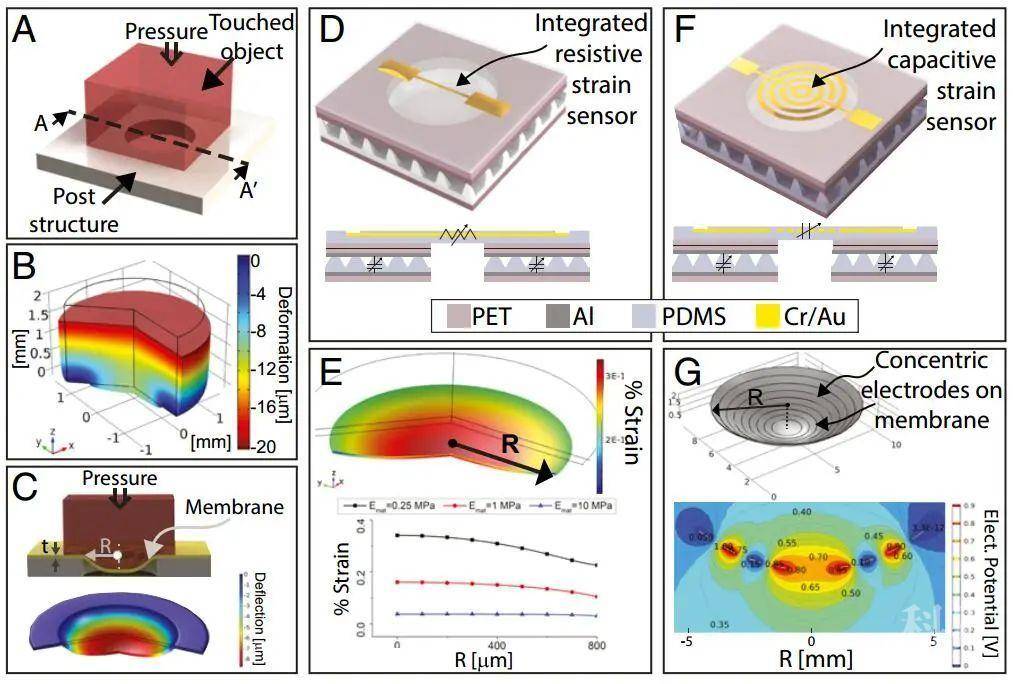 图2、独立式顺应性感测单元的FE模型研究人员利用了弹性体PDMS来产生具有不同模量的材料。同时,还测试了三种不同的PDMS比例,即PDMS(10: 1)、PDMS(25: 1)和PDMS(50: 1),厚度都为3 mm,通过单轴压缩测试确定杨氏模量分别为2.02±0.18、0.39±0.038和0.0247±0.0017 MPa。当传感器与更柔顺的材料接触时,传感器的响应灵敏度更高。对于PDMS(50: 1)、PDMS(25: 1)、PDMS(10: 1)和玻璃测得的S值分别为104±7.8、75±6.1、47±2.4和11±0.94 Ω/N。对不同材料的顺应性传感器的测量,发现更顺应性的材料产生了更高的S。通过测试相同厚度(3 mm)的各种物体,这些物体均支撑在刚性基板上,且根据材料的杨氏模量能够显示出S的显着差异。因此,在材料尺寸未知的情况下,传感器输出S可用于根据其柔度进行分类。
图2、独立式顺应性感测单元的FE模型研究人员利用了弹性体PDMS来产生具有不同模量的材料。同时,还测试了三种不同的PDMS比例,即PDMS(10: 1)、PDMS(25: 1)和PDMS(50: 1),厚度都为3 mm,通过单轴压缩测试确定杨氏模量分别为2.02±0.18、0.39±0.038和0.0247±0.0017 MPa。当传感器与更柔顺的材料接触时,传感器的响应灵敏度更高。对于PDMS(50: 1)、PDMS(25: 1)、PDMS(10: 1)和玻璃测得的S值分别为104±7.8、75±6.1、47±2.4和11±0.94 Ω/N。对不同材料的顺应性传感器的测量,发现更顺应性的材料产生了更高的S。通过测试相同厚度(3 mm)的各种物体,这些物体均支撑在刚性基板上,且根据材料的杨氏模量能够显示出S的显着差异。因此,在材料尺寸未知的情况下,传感器输出S可用于根据其柔度进行分类。 图3、RMB和CMB传感器的表征最后,研究人员制备了一个独立的感应单元,其由一个面积为1×1 cm2的RMB传感器组成,并集成在机器人手指的一侧。在机器人手指之间放置不同的材料,发现当电容达到最大极限时,机械手手指就会停止并重新开始沿相反方向移动,以释放所抓取的材料。对于顺应性材料,在类似的作用力下,最大电阻值会增加。该结果证明了该传感器可用作机器人手指上的顺应性传感器的能力。此外,还开发了两种不同的顺应性映射器件,以显示传感器在假体应用中的适用性。对于这两种测试,接触更柔顺材料的像素具有相对较高的S值。对于这两种情况,顺应性传感器都能够对材料的顺应性进行分类,从而证明该器件具有潜在的假肢传感器的功能。
图3、RMB和CMB传感器的表征最后,研究人员制备了一个独立的感应单元,其由一个面积为1×1 cm2的RMB传感器组成,并集成在机器人手指的一侧。在机器人手指之间放置不同的材料,发现当电容达到最大极限时,机械手手指就会停止并重新开始沿相反方向移动,以释放所抓取的材料。对于顺应性材料,在类似的作用力下,最大电阻值会增加。该结果证明了该传感器可用作机器人手指上的顺应性传感器的能力。此外,还开发了两种不同的顺应性映射器件,以显示传感器在假体应用中的适用性。对于这两种测试,接触更柔顺材料的像素具有相对较高的S值。对于这两种情况,顺应性传感器都能够对材料的顺应性进行分类,从而证明该器件具有潜在的假肢传感器的功能。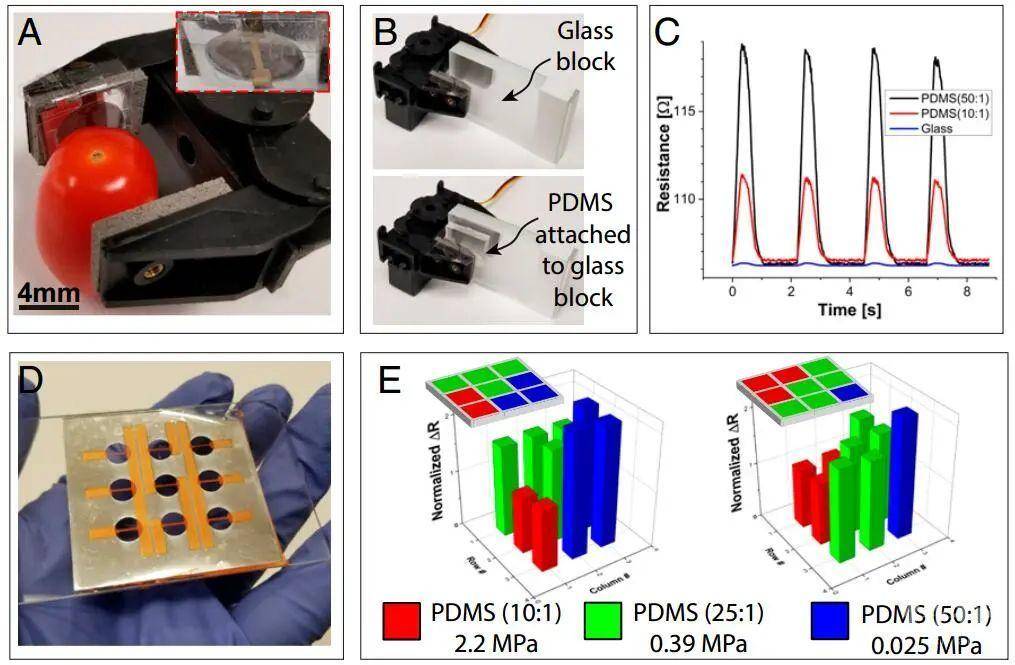 图四、将顺应性传感器集成到机器人夹具中并演示
图四、将顺应性传感器集成到机器人夹具中并演示来源:Polymer-science 高分子科学前沿
原文链接:https://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651730729&idx=3&sn=c5e350cd1da508bcc3318ba5c341617b&chksm=8b4a216cbc3da87a0e42c36449cfeba445c052baf594181498d433e9661a915a7fd7c8e427b7#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

石墨烯传感器助力“意念控制”机器人

资讯 | 鞋内传感器和移动机器人 帮助老年人保持活跃

嵌入式传感器将是未来机器人等技术增长的核心

让柔性机器人触觉更灵敏,基于颜色的传感器可模拟皮肤多重感知
苹果WWDC 2017干货亮点全在这里

【WRC • 风向】嵌入式传感器将是未来机器人等技术增长的核心

【WRC • 风向】2026年机器人传感器市场将突破40亿美元

仿人类皮肤传感器,让机器人轻松穿针引线夹鸡蛋

一种制造软机器人传感器的可持续策略
解析工业机器人常用的传感器


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号