科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2018-01-25
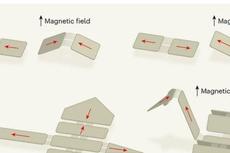
制造出像人类一样灵活、敏捷、可应对多种环境条件的机器人一直是科学家们的梦想。1月25日,马克斯普朗克智能系统研究所的科学家们在《自然》发表一篇论文,报告了一种毫米尺度的磁控软体机器人,它能够进行不同形式的运动。
该机器人为矩形,在运货的时候可以在爬、走和游三种运动形式之间切换,有望应用于微工程和健康医疗领域,如靶向药物递送或微创手术。
已有的小型机器人可以到达人类无法触及的位置,但是它们常常难以应对复杂的表面或地形,而软体机器人与之比较起来拥有更强的移动性。Metin Sitti与同事开发出了一种磁控硅树脂装置,它能够在多种不同的运动形式之间切换,包括滚和跳,具体视地形而定。该装置能够在没有物理干预的情况下,游过液体,移动至固体非结构化表面,并且可以拾起货物,将货物运输、存放至其它位置。
科界原创
编辑:张梦
MIT赵选贺《Nature》评述:纳米磁控微型软体机器人

《机器人》在线论坛--软体机器人,马上开播啦!

材料:快速响应型磁性软体机器人

终结者降临?柔性可自愈装置可仿生肌肉

3D打印软体机器人?
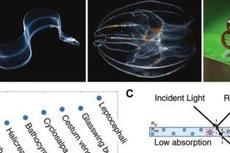
伪装的最高境界——透明软体机器人!
【CAA云讲座】软体机器人专题论坛|上海交通大学王贺升教授:软体机器人建模与控制
全新磁驱动高速软体机器人问世

2020“软体机器人”研讨会火热报名中!

仿变色龙软体机器人问世


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号