科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-07-16
该研究分别提出了双路采样算法、汇点连接空间和弹性缩放策略。
针对算子层面的搜索,该研究实验发现现有的单路采样方法会导致算子崩溃现象发生,即在搜索过程的早期阶段算法就在某些搜索层中聚焦于某一个特定的算子,并在余下的搜索过程中陷入其中保持不变,导致搜索到非最优的网络架构。针对此问题,该研究设计了多种采样方式,发现加入随机路径采样的双路采样方法可有效缓解算子崩溃现象发生。
针对深度层面的搜索,现有算法通常直接将跨层(Skip)算子加入到待搜索候选算子集中。但由于跨层算子的非参数性以及与其他算子的互斥性,这种设计方式会导致网络深度的搜索不稳定,在整个搜索过程中有非常大的抖动。此外,跨层算子的直接加入也会引起架构冗余现象发生。为了解决这个问题,该研究设计了一个汇点连接搜索空间,将跨层算子的搜索剥离出来,增加深度搜索稳定性,同时也解决了架构冗余问题。
针对宽度层面的搜索,该研究发现由于宽度搜索空间粗粒度的离散性和无界的资源约束目标函数项,现有方法很难搜索到严格满足特定资源约束的网络架构,且对资源约束目标函数项的超参数设置十分敏感。为缓解这些问题,该研究提出弹性缩放策略在搜索过程中动态自适应地调整超网络中每一搜索层中每一搜索算子的宽度。
相关成果已被计算机视觉领域学术会议ECCV2020接收。
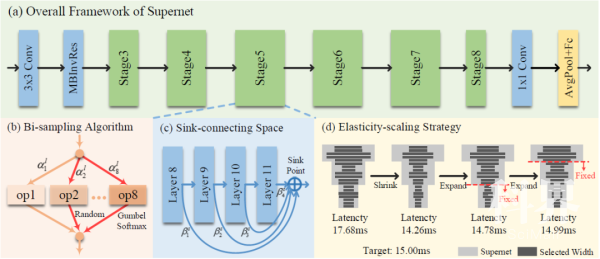
三自由度网络架构搜索框架图
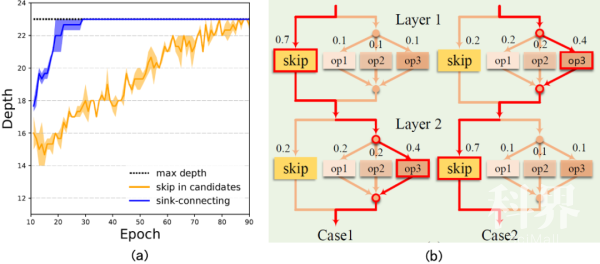
搜索过程中架构深度变化和架构冗余
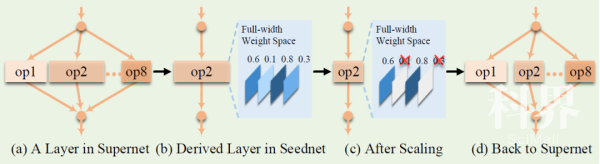
弹性缩放策略
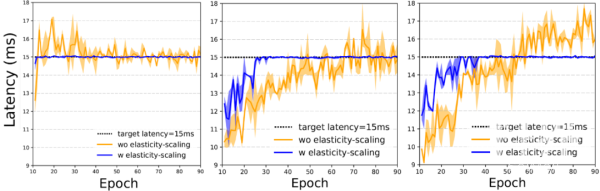
不同资源约束目标函数项下弹性缩放的有效性
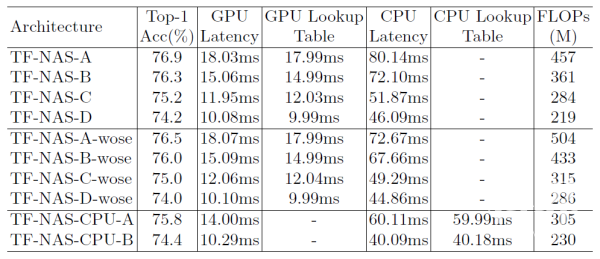
GPU和CPU上搜索架构结果,GPU时延测试批大小为32,CPU时延测试批大小为1
来源:中国科学院
原文链接:http://www.cas.cn/syky/202007/t20200713_4752897.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

揭秘美国网络安全体系架构

NAS-FPN:基于自动架构搜索的特征金字塔网络

【网络扶贫精选论文】基于NB-IoT网络的智能医疗应用架构

为何卢浮宫博物馆地下有台粒子加速器?

一度暑出处暑时 秋风送爽已觉迟

茶满七分 情满七夕!这份祝福请您“茶”收!

中国电子学会发布新一代人工智能领域十大最具成长性技术展望(2018-2019年)
【深度】自动化所提出多自由度网络架构协同搜索新方法

谷歌大脑重磅研究:神经结构搜索发现全新特征金字塔架构,超越Mask R-CNN等

科学家提出多自由度网络架构协同搜索新方法


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号