科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2018-03-07
一辆无人驾驶汽车行驶在蜿蜒的街道上,即将急拐弯换道,此时道路上正滚来一个玩具球,尽管车里没人能看到那个球,汽车还是会停下来躲避。这是因为这款车配备了极其敏感的激光技术,可以反射附近的物体来看到拐角盲区。
以上情境是美国斯坦福大学研究员为一个系统想象出来的众多情形之一,这个系统可为处于视野盲区的物体生成图像。论文的第一作者、斯坦福大学电气工程系助理教授Gordon Wetzstein在3月5日发表于《自然》期刊上的评论中说道:“这听起来很神奇,但非视线成像的想法是可行的。”
“非视线成像中一个重大挑战是在噪声测量中找出一种有效的方法来重建隐藏物体的3D结构,” 该论文的合著者、斯坦福计算成像实验室研究生David Lindell说:“我认为这种方法的巨大影响在于它的计算效率。”

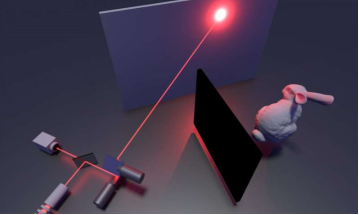
针对这个系统,研究员在高度敏感的光子探测器旁边放了一个激光器,该探测器甚至可以捕捉单个光粒子。他们朝墙壁发射人眼看不到的激光脉冲,这些脉冲在碰到拐角处的物体时会反弹回到墙上来,然后被光子探测器接收。目前扫描需要两分钟到一小时,具体取决于光照和盲区物体的反射率。
一旦扫描完成,算法将计算被捕获光子的路径,就像犯罪剧中神秘的图像增强技术一样,逐渐把模糊的点变成清晰的3D模型。这些算法可在不到一秒的时间内完成对光子数据的分析,效率高得可直接在普通笔记本电脑上运行。考虑到现有算法的卓越表现,研究员认为还可以加快速度,让扫描与图像恢复同步完成。
斯坦福团队会继续钻研这个系统,以应对现实世界多变的情况并加快扫描效率。例如,为了探测盲区物体,是需要捕捉光粒子的。无人车与盲区物体的距离、周围的光照条件等各种因素都会影响到光子捕捉。另外,这种“透视”技术还得充分利用散射的光子。而散射的光仍是当下汽车导航LIDAR系统故意忽略的信息。
“我们相信该算法已经可以用于LIDAR系统,” 该论文的主要作者之一、斯坦福计算成像实验室的博士后Matthew O'Toole说:“关键问题是目前的LIDAR系统硬件是否支持这种类型的成像。”
在透视系统上路之前,它还必须更好地捕捉在光照条件下和运动中的物体,如弹跳球或奔跑的小孩。系统在户外测试中取得了成功,但需要采用间接光线。同时系统在辨认安全服装或交通标志等逆反射物体时表现非常成功。研究人员表示,如果今天给汽车配上这项技术,汽车能很容易检测到道路标志、安全背心或路标等事物。但是对于没有穿会反光衣物的一般路人来说,系统就无法透视了。
“这在行业域向中迈出了一大步,希望我们所有人都受益,”Wetzstein说:“未来,我们要加强这套系统的实用性。”
科猫原创
编译:Tracy 审稿:阿淼 编辑:张梦
来源:https://phys.org/news/2018-03-technique-hidden-corners.html
上海光机所在飞秒拍瓦激光系统色差补偿方面取得进展


飞秒拍瓦激光系统色差补偿研究获进展

材料表征的“利刃”:亚微米空间分辨率的真空紫外激光系统

线上培训,不能成为减负盲区
量子传感可突破经典探测盲区 | 研究快讯
新型激光系统可偏转小行星并能实现星际旅行



上海光机所提出一种用于四阶色散控制的新型双CPA激光系统

路上遇到TA,记住这几点能救命!
美国空军成功演示能击毁多个目标的激光系统

能救命!哪些位置是大货车的盲区?


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号