科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-07-30
来源:机器人大讲堂
1.沈阳自动化所协作机器人研究获进展
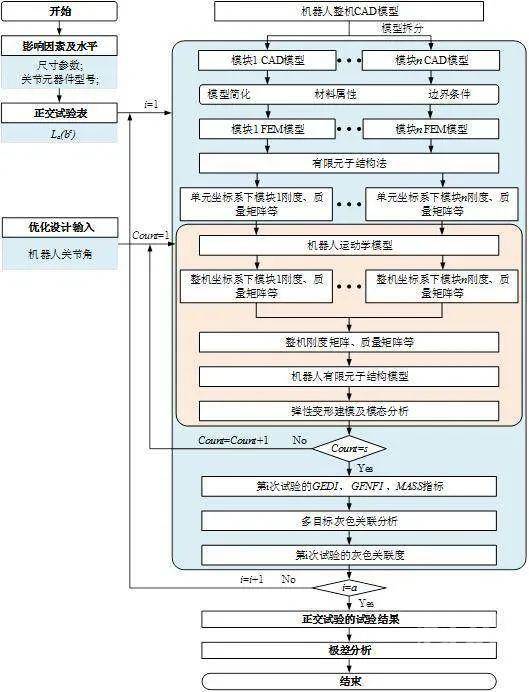
近日,中国科学院沈阳自动化研究所协作机器人研究团队提出了一种基于有限元子结构法和正交设计的协作机器人全域多目标优化设计方法,该方法以机器人弹性变形、固有频率以及质量等多种性能指标为优化目标,解决了协作机器人结构优化中存在的位姿及非结构参数影响、多目标耦合、计算速度与精度平衡等问题,具有建模精度高、计算速度快、对各模块的复杂形状适应性好等特点,能够有效提高协作机器人的刚度及动态性能,相关成果发表于优化设计领域国际著名期刊《结构和多学科优化》(Structural and Multidisciplinary Optimization)。
来源:RoboSpeak 机器人大讲堂
原文链接:https://mp.weixin.qq.com/s?__biz=MzI5MzE0NDUzNQ==&mid=2650227220&idx=2&sn=ac45e22cb7f8dfe6e05ec521362479da&chksm=f47570acc302f9bad91c457473dc24466fdcb46576d0df0984023b51a2ff4f466b07b7ff9c9e#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

前沿综述丨机器人技术——从自动化到智能系统

NATURE 人工智能 | 神奇的粒子机器人

CMU开发新设备自动化机器人训练动物大脑

【WRC • 资讯】机器人过程自动化?它是什么?
沈阳自动化所新型排爆机器人研究取得进展
“制造业转型升级”论坛在深圳举行

NATURE 人工智能 | 神奇的粒子机器人

沈阳自动化所外肌肉机器人研究获进展
全球人工智能与机器人峰会在深圳召开


【延期通知】中国自动化与人工智能教育大会延期通知


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号