科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-07-30
来源:中科院深圳先进院
近日,中国科学院深圳先进技术研究院夏泽洋研究员团队等在软体机器人形态学计算方面的研究取得新进展。相关研究结果以Optimal Design of Soft Pneumatic Bending Actuators Subjected to Design-Dependent Pressure Loads为题发表在IEEE/ASME Transactions on Mechatronics杂志上(2019, 24(6): 2873-2884 ),夏泽洋研究员为该论文通讯作者。
软体驱动器的设计方法可以分为两类:仿生设计方法和形态学计算方法。与需要大量实验的仿生设计方法相比,形态学计算方法可以根据个性化的设计需求生成创新的结构。现有的形态学计算方法一般基于拓扑优化方法实现,不能直接应用于弯曲型软体气动驱动器(SPBA)设计,因为SPBA的形态通常还与所承受的设计有关的压力载荷相关,其施加的位置取决于具体的内部腔体结构。为此,作者们提出了一种基于双向渐进拓扑结构优化法的SPBAs形态学计算框架,以解决软体机器人形态学计算及优化关键问题。
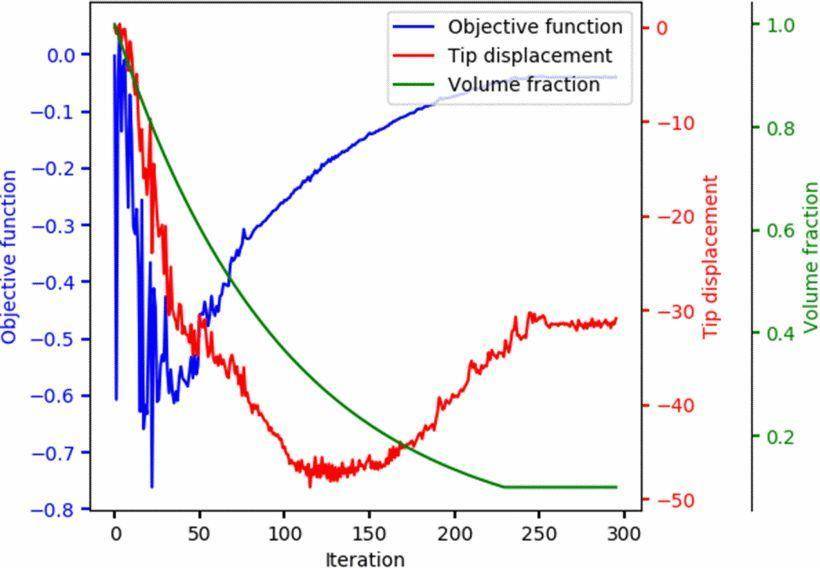
目标函数、末端点竖直位移和体积分数的演化过程
该优化设计框架基于数值拓扑优化方法建立,并将SPBA视为顺应性机构,设定的优化目标是实现特定加载压力下的最大弯曲变形和结构刚度。在有限元分析中,设计域中的每个元素根据灵敏度设置为实体或空腔,灵敏度用目标函数对设计变量的导数近似逼近。迭代优化时,定义压力作用于可移动的实体边界表面。通过上述优化得到的驱动器拓扑结构结果制作样机,在无负载实验中对其性能进行了评估。同时,为验证该方法的有效性和实用性,设计了具有和不具有应变限制层的矩形实体和圆柱形SPBA,分别得到了使其实现最大弯曲运动的优化结果。
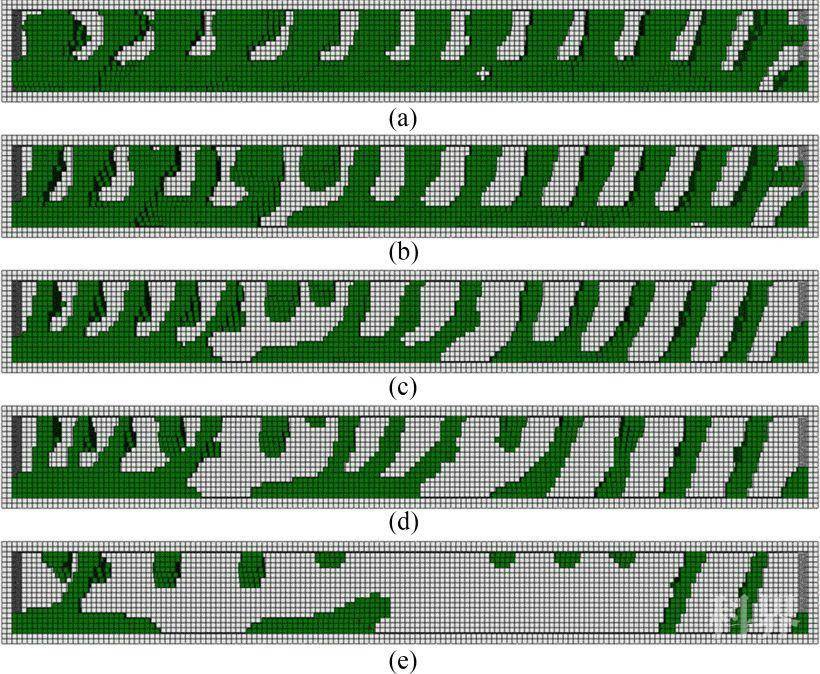
基于双向渐进拓扑结构优化法的 SPBAs 形态学计算的拓扑结构的演化过程示例
该研究从理论分析角度验证了广泛应用的气动网格式(PneuNets)软体驱动器的结构合理性。同时,该方法可以改变当前软体驱动器基于经验的试错式结构设计模式,使SPBA设计面向特定的个性化运动需求,并使得研究能够应用于需要结合结构约束和设计需求的应用领域,如通过更改优化目标函数,可创建用于满足手部康复运动的非对称结构的SPBA。
形态学计算是软体机器人设计亟待解决的关键基础问题。该研究建立了一种基于拓扑优化的软体机器人形态学计算方法,是首次尝试使用数值计算的方法从形态学计算的角度来设计软体驱动器。基于拓扑优化方法的形态学计算框架,为满足特定功能任务的软体机器人的个性化形态设计提供了一种解决方法。
通讯作者简介夏泽洋,博士,中国科学院深圳先进技术研究院研究员、博士生导师,英国工程技术学会会士,广东省自然科学杰出青年基金获得者。吴文俊人工智能自然科学奖获得者,熊有伦智湖优秀青年学者奖获得者。2008年获清华大学博士学位,之后在新加坡及美国工作,2012年回国加入中国科学院深圳先进技术研究院并建立医疗机器人与生物力学实验室,致力于医疗及健康领域的创新性机器人理论、技术与系统的研究。主持了国家重点研发计划国际合作重点专项、国家自然科学基金、广东省杰出青年科学基金、广东省重大科技专项等重要项目近20项,发表学术论文100余篇,申请专利50余项。主持的“精准口腔正畸诊疗机器人”获2017年吴文俊人工智能科技奖自然科学奖,并荣获2019年熊有伦智湖优秀青年学者奖。夏博士是IEEE RCAR 2019(实时计算与机器人学)国际会议大会主席,还是中国电子学会青年科学家俱乐部副主席兼2021年轮值主席,中国电子学会嵌入式系统与机器人分会副主任委员、中国自动化学会机器人专委会委员,中国科学院青年创新促进会广州分会第二届委员会会长,是2018年中国电子学会“优秀科技工作者”获得者。
来源:zky_szxjy 中科院深圳先进院
原文链接:https://mp.weixin.qq.com/s?__biz=MzA4NzI3NTYyNA==&mid=2652847255&idx=2&sn=931dd06639fb10ae5b48cf68d3a5c859&chksm=8bd07d90bca7f486148fde46cba630485fd4a1711b2f7ed4d837232bd26d19c8b1dacb29fd0b#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
植物形态学
数学形态学
第九届湖南省青少年机器人竞赛在株洲举行



【机器人】《机器人》“空中机器人集群自主控制”专刊征文通知

【CAA云讲座】软体机器人专题论坛|中国科学院深圳先进技术研究院夏泽洋:一种基于拓扑优化的软体机器人形态学计算方法
马林看望第十七届青少年机器人竞赛北京队参赛师生




新型机器人可编织玻璃纤维结构
软体机器人形态学计算研究获进展

可卷起放口袋机器人!全软皮肤结构用于机器人运动和运输
MPB:林科院袁志林组-栎类外生菌根形态学特征描述


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号