科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2018-09-03

照片来源:庆应大学
市面上的大部分远距临场机器人(telepresence)都挺有吸引力的,因为它们可以提供类似移动代理人的能力(比如远程带你兜风的能力)。在很多情况下(比如你想远程寻找大象时),此类机器人可以实现很棒的功能,但是它们并非在所有情况下都那么厉害,譬如你想在需要物理互动的合作性任务中帮助他人时。合作,尤其是指令,通常取决于一个人向另一个人展示如何做某事的肢体动作,即使远距临场机器人有一个或两个手臂,它也未必能与远程用户产生有效的直接互动。
日本庆应大学的机器人专家开发出一种新型远距临场机器人,允许用户远程控制别人的身体来帮助他们完成操作任务。(类似的想法还有 Tele-Actor,它是由机器人专家、艺术家 Ken Goldberg 及其在 UC 伯克利的同事构思出来的。)庆应大学的研究者将它们创造的系统称为 Fusion,它“栖居”在人的背上,用户可以使用自己的第二双手臂(即机器人的机械臂)展示如何完成任务,甚至还可以直接移动“被栖居者”的手臂。
“Fusion通过给两个人共享相同视角来实现身体代理:一个是代理者(surrogate),一个是操作者(operator),它使用安装在代理者身体上的两个机械臂来扩展操作者手臂的移动距离和动作。这些手臂可在合作场景中独立于操作者手臂来使用,也可以被连接到代理者手臂上,直接远程辅助和支持代理者的动作。
操作者使用现成的头盔显示器(Oculus CV1)连接自己和代理者的身体。代理者背上的三轴机器人头部具备立体视觉和双声道听觉,它还有两个仿人机械臂(6 个自由度)和可移动的手部。”
通常,此类语境中“代理”指由人类控制的完全独立机器人,如 MIT 的 HERMES 项目,远程人类使用 VR 通过机器人的眼睛看到场景,同时通过移动自己的手臂来控制机器人的肢体。Fusion 的运行原则与其类似,但不同点在于它“栖居”在人类的背上,它运行时具备不同程度的侵入性:
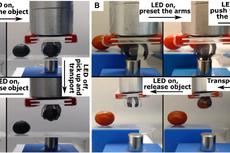
有向性:机械手可以帮助或命令代理者的动作方向。
强制性:远程用户可以把机器臂与代理者的手连接,从而直接控制代理者的肢体动作。
诱导性:远程用户通过拖拽代理者,来强制性指导代理者的移动方向。
Fusion 的一大优势是操作者可以和代理者共享同样的视角,这样更方便在物理任务中给出反馈。最好的场景就像是身边有一位朋友温柔地帮助你做到最好。最坏的场景是身后站着一位朋友,一边强迫你打自己的脸一边还要问你为什么要自己打自己。不管哪种场景,我都确定这将是一种独特的学习体验。
由日本庆应大学和东京大学的MHD Yamen Saraiji、Tomoya Sasaki、Reo Matsumura、Kouta Minamizawa及Masahiko Inami合写的“Fusion: Full Body Surrogacy for Collaborative Communication”发表在了SIGGRAPH Emerging Technologies 2018会议上。
来源: IEEE电气电子工程师学会
来源:cieinfo 中国电子学会
原文链接:http://mp.weixin.qq.com/s?__biz=MzA4MTgwMjkyNw==&mid=2657297005&idx=3&sn=f2e8660014c90de7efb7dc43afef178c&scene=0#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
机器人 100% 移动 场景 代理者 手臂 远程 临场机器人 动作 肢体
第九届湖南省青少年机器人竞赛在株洲举行



变形机器人?仿生移动机器人?美陆军实验室研发新概念军用机器人
1800余名选手参加南通市教育机器人竞赛


顺德区数控机械创新应用示范工程及自动化技术交流会召开
用磁场和光远程控制软机器人

可穿戴机器人恢复患者手臂功能
苏州首届青少年科技节打造“小创客”的科技盛宴
工程:变群变形移动机器人

100%柔性的机器人诞生可完成多项复杂动作

【WRC资讯】打破时空限制 5G远程超声机器人移动车让诊疗服务“近在咫尺”


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号