科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-01-18
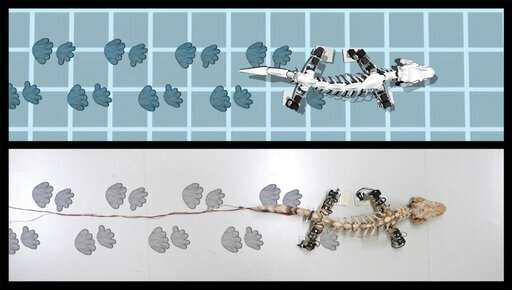
早期陆生动物是如何移动的?近日,德国科学家利用一具距今3亿年的化石骨架和化石足迹,构建了史前生物的移动机器人模型,在一定程度上回答了这个问题。
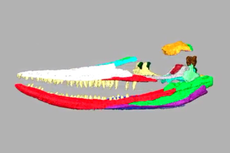
德国柏林洪堡大学的进化生物学家John Nyakatura花了数年的时间来研究一具于2000年从德国Bromacker采石场发掘出来的、距今2.9亿年的化石。它“保存完好且关节清晰”,被科学家命名为Orabates pabsti。除此之外,科学家们此前还鉴别出了这种3英尺长(90厘米)生物的化石足迹。
Nyakatura与位于洛桑的瑞士联邦理工学院的机器人专家Kamilo Melo合作构建了这种生物的运动模型,并于1月16日将相关成果发表在了《自然》杂志上。研究中,他们制作了这种史前动物的等比模型。Nyakatura 说“我们仔细地重构了每一块骨骼,然后用不同的方法来测试它的运动模式,并排除了一些在解剖学上不可能出现的情况,以使它的步态能够与化石足迹相匹配。”
此后,他们使用一个稍微放大的机械兽模型(OroBOT)重新模拟了这种运动。这个机械兽由不同的电机组成,电机则通过3D打印的塑料部件和钢铁部件连接在一起。Melo说“我们的模型考虑到了现实中的重力和摩擦力因素,因此能更加接近真实情况地测试其动力学参数。”研究组同样也将这个运动模型和现存蝾螈和鬣蜥的运动做了比较。

基于这个机械模型,科学家认为这种史前生物的移动能力要比此前认为的更加先进(想想它们是蹦蹦跳跳运动,而不是滑来滑去地运动)。“它走路的姿势相当挺拔,没有将肚子或者尾巴拖在地上。”Melo说。
科界原创
编译: 攀汗
审稿:西莫
责编:张梦
期刊来源: 《自然》
期刊编号: 0028-0836
原文链接:
https://phys.org/news/2019-01-robot-recreates-million-year-old-creature.html
版权声明:本文由科界平台原创编译,中文内容仅供参考,一切内容以英文原版为准。转载请注明来源科技工作者之家—科界App。

史前模拟研究:人类祖先或与硕鬣狗争食动物腐肉

今日科技话题:“3D打印机”、史前海洋动物、西红柿味道有关的基因、绳文人、基因药物疗法
史前四足动物何时开始直立行走?机器人告诉你




大美科技馆 |假期去哪?走进中国古动物馆看看史前的巨龟
医学扫描仪帮助解开史前巨型海洋爬行动物的秘密
中国科学院古脊椎动物与古人类研究:所古DNA揭秘中国史前人群迁徙动态与族群源流

新史前“霍比特人”证明恐龙灭绝后哺乳动物快速进化...... | 一周科技话题

从微小史前蜥蜴看爬行动物演化 |《科学报告》

新发现!中国科学家在琥珀中发现史前海洋动物

你爱吃甜食,史前灵长类动物也不差


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号