科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-02-02
除了自学走路和表演后空翻,科学家还想让机器人学会懂礼貌,不乱动别人的东西。
最近,耶鲁大学计算机学院的两位人工智能研究员训练出了一款“举止得体”的机器人,这款机器人具有所有权意识,可以通过自主学习来了解物品的归属情况并做出合适的举动,不会像春节回家的“熊孩子”那样乱翻你的东西。
为了让机器人具有明确的所有权意识,研究人员开发了一个能够学习并符合所有权规范的系统,然后将这个系统部署在巴克斯特(Baxter)机器人平台上。被部署所有权系统的巴克斯特机器人可以通过两种方式掌握“物品归谁所有”这个问题,并作出符合社会规范的行为。
第一种方式是学习直接的指令,例如,机器人被人类口头告知不要去接触属于特定人的某些物体,这时候,根据一般的社会规则,机器人会推断出,它不应该接触属于别人的物品。另一种方式是,机器人与环境交互,通过观察具体的案例来归纳物品的归属情况,并作出适当的行为。
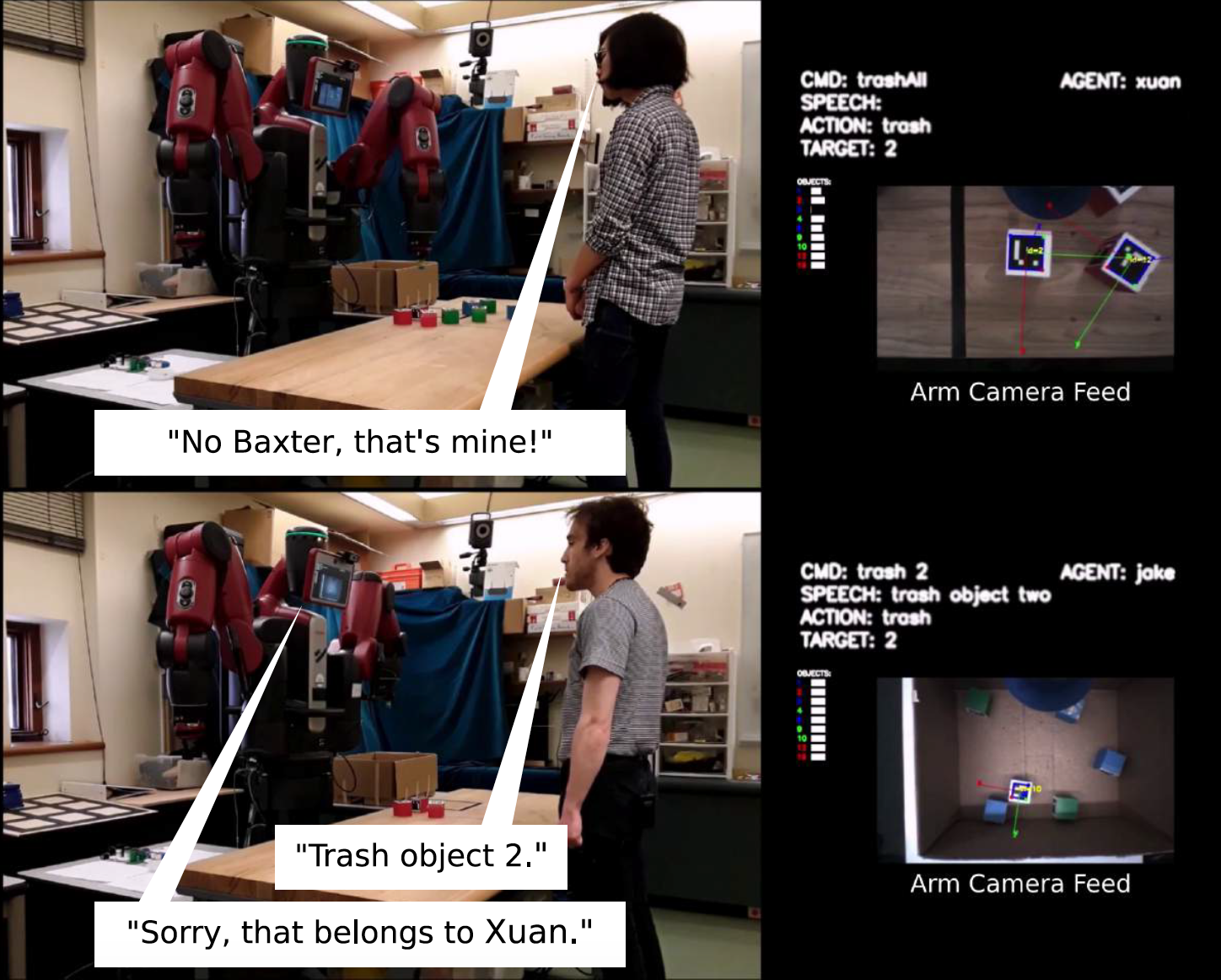
耶鲁大学的人工智能研究员Xuan Tan和杰克·布劳尔(Jake Brawer)用一次积木实验展示了上述两种学习方式。
桌子上放着一些积木,有红、绿、蓝三种颜色。实验中,Tan一直把玩几块红色的积木,这让一行为使机器人自行推断出:这些红色的积木都属于同一个人。在这里,机器人用了第二种方式,通过观察来归纳物品的所有权归属问题。
接着,Tan指示机器人扔掉桌上的所有东西。当机器人接近桌上的一块红色积木时,Tan制止了它,并说:“这是我的”。这是一个直接指令,使机器人意识到它不应该扔掉属于Tan的东西。由于机器人还假定其他的红色积木也属于Tan,于是,它在清理桌子时把所有的红色积木都留了下来。
后来,当杰克·布劳尔命令机器人扔掉桌上的一块红色积木时,机器人回答说:“对不起,如果它是Tan所有的,我不可以扔掉它。”
从实验本身来看,结果似乎很成功。机器人通过自学了解了红色积木都归Tan所有,并做出了合乎社会规范的行为。但桌上的积木只是一个简单的场景,真实世界的情况会复杂得多。
对人类而言,掌握所有权的概念十分容易,加拿大滑铁卢大学的心理学家奥利·弗里德曼(Ori Friedman)曾提出,无需父母的教导,二至三岁的孩子就可以自发地产生所有权意识。同样的事情,在机器人身上则是另一番景象,让机器人完全掌握所有权概念并作出正确的举动并非易事。
塔夫茨大学的计算机科学家Matthias Scheutz评价说,该系统能在多大程度上推广并适用于真实场景还是一个开放的问题,但这无疑是一个很好的“首次尝试”,让机器人尊重物品的所有权。
随着人工智能和机器人技术在社会生活中的普及,智能系统的社会能力变得越来越重要。而社会能力的其中一个要素就是学习和遵守社会道德规范的能力。物品所有权的意识是这些社会规范良好缩影。
研究员Xuan Tan认为,一个有效的协作机器人应该懂得自学并区别对待不同所有权属性的物品。例如,在不需要人类帮助列举的情况下,一个垃圾收集机器人需要知道,自己应该丢弃一个空的汽水罐,而不是一张珍贵的照片或一个未开封的汽水罐。
这项研究的相关论文《那是我的!机器人学习所有权关系和规范》(That’s Mine! Learning Ownership Relations and Norms for Robots)在2019年2月1日的美国人工智能学会(AAAI)人工智能会议上展示。
来源:澎湃新闻

人工智能重塑机器人产业
人工智能+机器人:制造业效率提升新机会
聚焦2019世界机器人大会 人工智能重塑机器人产业

聚焦2019世界机器人大会 人工智能重塑机器人产业
全球人工智能与机器人峰会在深圳召开



聚焦2019世界机器人大会 人工智能重塑机器人产业

“人工智能手套”让机器人有了触感

聚焦2019世界机器人大会 人工智能重塑机器人产业
中国机器人及人工智能大赛开幕

机器人与人工智能: 应对全球挑战的终极途径


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号