科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-05-14
来源:国际太空
尽管日本宇宙航空研究开发机构(JAXA)研制的小行星探测器“隼鸟”(Hayabusa)出现了一系列故障,包括3 个反作用飞轮中两个停转,化学推进系统燃料泄漏等,但管控人员利用1 个还能正常工作的飞轮和离子发动机进行精心地管控和操作,使携带着从小行星糸川(Itokawa)上采集到的10mg 样品的密封舱安全回到地面。这也使日本成为世界上首个掌握小行星取样返回地面的国家。
确定投放和着陆与取样点以及投放目标标识器
值得庆幸的是,利用探测器上搭载的光学导航相机、近红外分光器、中红外摄像敏感器和激光高度计等观测和测量仪器在距龙宫小行星20km 的上空和多次降轨所进行的一系列观测和测量,掌握了龙宫的形状、直径和体积,获取了龙宫小行星上的重力参数,确认了龙宫表面覆盖物的密度等;判别龙宫小行星表面基本(50% 以上)都是内部有空隙的岩块;通过对其考察、分析和重力测量,基本可判断龙宫小行星表面的形成与进化过程,确定其自转周期,并认定龙宫小行星是一个对称性强、高速旋转的陀螺形小天体,而且因离心力导致变形的可能性很大;还认定即便龙宫小行星以当前2 倍的速度自转,也不会使其表面岩石等呈倾斜分布状态;光学导航相机的分光观测数据还证明:龙宫小行星若抵达赤道分界线处,即便是在受宇宙风化影响小的情况下,各种新鲜物质裸露的概率也很大;还判断出位于赤道分界线处的L08 区域是龙宫小行星上最适于取样的地点。
确定投放和着陆与取样点
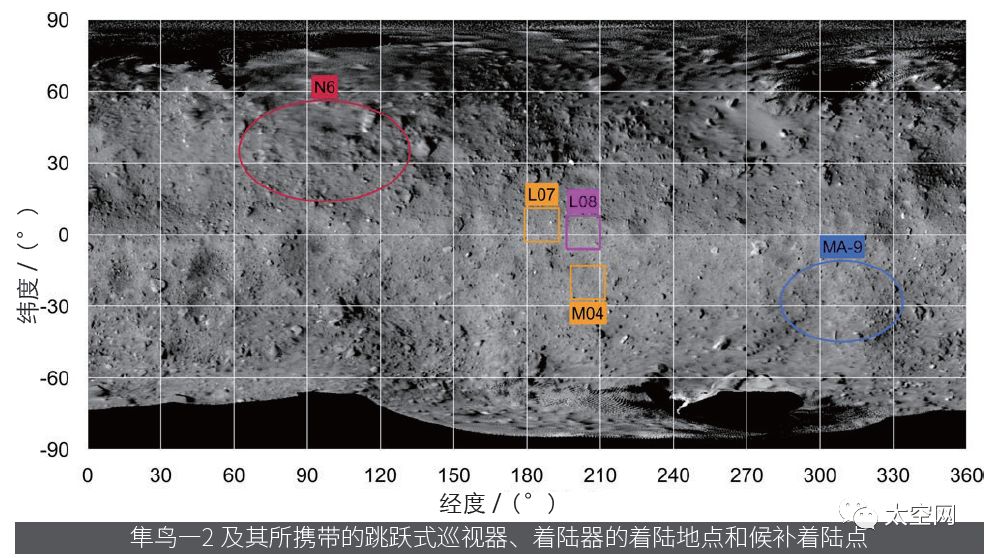
2018 年8 月17 日,召开了有决策者、参研单位技术人员参加的“确定投放巡视器、着陆器和探测器着陆点协商会”。对光学导航相机等提供的观测图像和测得的重力数据,以及分析结果,从位于低纬度和中纬度范围内选出的13 个候补投放和着陆点中筛选出7 个供投放巡视器和着陆器,9 个供隼鸟-2 着陆的着陆点和候选着陆点;再继续分析比对,最后确定了执行投放和着陆任务的时间,投放3 个跳跃式巡视器MINERVE- Ⅱ和小型着陆器MASCOT 的地点,以及探测器的着陆点、候选着陆地点。
投放3 个跳跃式巡视器MINERVE- Ⅱ -1A,1B和MINERVE- Ⅱ -2 时间:2018 年9 月21 日;投放地点:N6。
投放着陆器MASCOT 时间:2018 年10 月3 日;投放地点:MA9。隼鸟-2 首次着陆时间:2019 年2 月22 日;着陆点:L08;候补着陆点:L07、M4。
隼鸟-2 第二次着陆时间:2019 年5 月下旬;引爆爆炸装置时间:4 月5 日;爆炸点和着陆点:L12;候补着陆点:S01。
参会者认为:在N6 点投放巡视器,MA9 处投放着陆器,隼鸟-2 探测器在L08 和L12 着陆,不仅有利于进一步确认龙宫当前的形状,还能通过对采集到的样品进行分析确认龙宫表面主要组成物质碳素的强度等,对研究太阳系的起源、进化和生命的起源有重要作用。
探测器上携带的巡视器、着陆器能否准确地投放到指定地点,探测器能否在指定的地点安全着陆,是能否完成一系列任务的关键,而要顺利地将巡视器、陆器投放到指定地点,探测器安全地在着陆点实现着陆,必须提前确定好投放地点和着陆点,对布满岩石的龙宫小行星尤其重要。
探测计划拟完成的核心任务
小行星探测器隼鸟-2 原计划在龙宫小行星表面着陆4 次:前两次是演练着陆,同时确认最终着陆点,但因龙宫小行星布满岩石,从安全角度考虑取消了演练。因此,隼鸟-2 探测器要完成的只有5 项核心任务。
通过观测与测量获取与小行星相关的信息,并提供确定投放和着陆点等依据。隼鸟-2 探测器利用搭载的光学导航相机、近红外分光器、中红外摄像敏感器、激光高度计等4 种观测和测量仪器对龙宫小行星进行详细地观测,获取用于龙宫小行星表面矿物质成分调查、记录龙宫表面温度变化,以及测得的龙宫表面磁场的照片和数据信息,还为管控人员提供选择投放和着陆点的信息,对此第2 章做了阐述;此外,分离监控摄像敏感器监控了撞击装置与探测器分离,以及引爆撞击装置形成锥形铜金属块及其快速撞击龙宫小行星上选定的撞击点和形成小行星坑情况。
投放跳跃式巡视器
隼鸟-2 探测器上携带了3 个跳跃式巡视器,其中两个巡视器MINERVE- Ⅱ -1A 和1B 是由JAXA 研制的,另一个MINERVE- Ⅱ -2 巡视器是由东北大学等5 所大学研制的。
(1)MINERVE―Ⅱ―1 概况
MINERVE- Ⅱ -1A 和1B 这两个巡视器在“隼鸟”上搭载的MINERVE 基础上做了必要改进,是一种新型跳跃式巡视器。MINERVE 巡视器没有在小行星糸川表面着陆的原因是,没有把下达投放指令与实际执行指令间的延迟(16s)计算在内。隼鸟-2 采取了杜绝这种低级人为差错的办法。
(2)投放地点和时间
在确定着陆点的协商会上,设计者阐述了设计时就提出的4 个必要条件:
1)远离选定的隼鸟-2 着陆点和候补着陆点;
2)与MASCOT 不能在同一着陆区域着陆;
3)MINERVE- Ⅱ不能在高温地带,以及阴影区非常小的位置与探测器分离,应在距赤道100m 的北半球上空与探测器分离,才能确保着陆后南北方向有一宽阔的移动和观测地带,否则若在南半球与探测器分离,要将巡视器投放到要求的地点,探测器很可能要下降到距龙宫小于30m 之处,这样,轨道控制精度稍有偏差,太阳电池翼等就可能受损;
4)必须确保MINERVE- Ⅱ与地球站通信畅通。协商会决定满足设计时就提出的这4 个条件,决定将MINERVE- Ⅱ 投放到N6 点。着陆时间为2018 年9 月22 日。
投放着陆器
小型着陆器MASCOT 是德国航空航天研究院(DLR) 和法国国立航天研究中心(CNES)共同研制, 搭载有广角摄像机、热辐射计、磁强计和分光显微镜等, 质量为10kg、车体为0.275m×0.290m×0.1956m,是一个以跳跃式前进的着陆器。
(1)投放地点和时间
在确定着陆点的协商会上,设计者也阐述了设计时就提出的4 个必要条件:
1)必须选择在北半球,并与隼鸟-2 演练触地点不在同一地点处投放;
2)与MINERVE- Ⅱ不在同一着陆点着陆;
3)着陆点必须在光学导航相机能够观测到的区域;
4)必须投放到MASCOT 与地球站顺畅通信地段。
结合广角光学导航相机提供的图像信息和重力测量数据,以及龙宫小行星表面岩石分布等状况,协商会确定小型着陆器投放到MA9(纬度:0°~―8°,黄经300°~ 320°)区段,投放时间定为2018 年10 月3 日。
(2)成功投放新型着陆器
2018 年10 月2 日11:50,隼鸟-2 从距龙宫小行星表面20km 处开始降轨,到10 月3 日10:55,分别放慢速度, 以40cm/s、10cm/s 和3cm/s 这3种速度降轨,到达距龙宫表面仅51m 处,开始投放MASCOT。10 月3 日10:57,MASCOT 成功地与探测器进行了通信;接着,连续发回了用广角导航相机拍摄的3 张龙宫小行星的照片,确认MASCOT 成功地在选定的着陆点MA9 处安全着陆。10 月3 日11:00,隼鸟-2 探测器开始升轨,10 月8 日15:00 回到距龙宫小行星表面20km 处。
结束语
在科学方面,隼鸟-2 对研究太阳系起源、进化和生命的起源有重要作用;在技术方面,有利于日本继续保持在深空探测技术领域的领先地位;在战略方面,有助于日本拓展在防卫领域的应用潜力;在社会方面,可培养深空探测技术人才,推进日本火星卫星探测着陆计划,并为日本加入构建国际月球站创造机会,增加讨价还价的砝码。
来源:nssc1958 国家空间科学中心
原文链接:http://mp.weixin.qq.com/s?__biz=MzA3NzgzODUwNA==&mid=2653475248&idx=3&sn=37050127797ca47974910e1417a55204&chksm=84979077b3e019615b9460a676128bef8a1bd23a35ee58c26551bb39147181cad3f58e9cb35f&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

能让细菌去挖掘小行星吗?比如这颗价值700万亿美元的小行星!

“小行星之战”开打

“龙宫”小行星为何缺水?

金属小行星为何密度偏低?

探索小行星防御新路径

太阳系的水从哪里来?一种新的物理模型揭晓答案

小行星探测专题(三):黎明号小行星探测任务划上句号
NASA要对小行星下手了

在小行星上找水,科学家有高招

小行星为何成为大热点


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号