科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-05-16
来源:中国指挥与控制学会

生物的运动离不开肌肉的收缩以及舒展的过程。仿生机器人以及运动辅助仪器的设计中,模仿肌肉作用的驱动部件是实现运动的关键。目前,驱动器方面的研究集中于对驱动方法(如电动、气动、液动)或是环境刺激(如光、湿度、磁场)的控制,由此实现的驱动器件往往只能实现单一的变形。需要集成众多驱动器和配件并进行精确的安装组建,才能实现复杂的运动。在微小尺度,制备分立部件再行组装的思路无法实现。
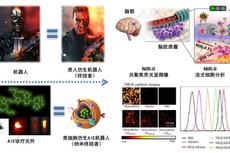
吉林大学张永来教授、清华大学孙洪波教授与新加坡国立大学仇成伟教授提出利用石墨烯与金纳米棒复合材料制备了光敏感的仿肌肉驱动器件,运用巧妙的设计方法,在光驱动仿生微小机器人方面取得了突破性的进展(如图所示)。具体机理为,石墨烯材料具有负热膨胀系数,将其与具有较大热膨胀系数的聚合物PMMA材料结合,就可在光热条件下产生单一的圆弧状弯曲。利用激光局部还原石墨烯氧化物的方法,对材料导热性能进行局部改性,实现“关节”部位导热性能和光热转化性能的提升。光照条件下,改性区域的弯曲程度大大提高,响应时间加快,便形成类似肌肉牵拉作用的关节弯曲效果。他们还加入了金纳米棒这一重要材料,利用其表面等离子体的作用,提升材料整体的光热转化效率,从而加速促进膨胀材料的形变。此外,金纳米棒材料独特的波长选择特性,为光驱动方法提供了除光强、时间外另一维度的调控方法,既波长调控。将掺入金纳米棒不同吸收波长的材料进行设计,就可实现不同“关节”部位的选择性弯曲。

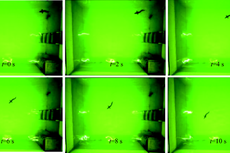
基于以上原理,制作并展示了微型仿生蜘蛛的爬行过程、仿生捕蝇草捕获过程,和仿生手各关节的逐一控制弯曲。相关成果以封面论文发表在Advanced Materials杂志上(DOI:10.1002/adma.201806386)。论文的第一作者是吉林大学博士生韩冰。该技术无须集成组装过程,实现了复杂的肢体动作和多足运动。充分体现了等离子体辅助型肌肉设计的灵活性,降低了爬行机器人制作成本,并可实现大规模的制备。这一工作将对微型仿生机械运动提供巧妙设计理念,从而起到重要推动作用。
本文来源:国际仿生工程学会
投稿邮箱:liuyali@c2.org.cn
长按下方二维码 免费订阅
如何加入学会
注册学会会员:
近期活动:
7月24日-26日·北京 | 第七届中国指挥控制大会暨第五届中国(北京)军民融合技术装备博览会2019烟台院士峰会暨数字地球与空天信息应用发展论坛 |
报名请点击公众号底部菜单栏
个人会员:
关注学会微信:中国指挥与控制学会(c2_china),回复“个人会员”获取入会申请表,按要求填写申请表即可,如有问题,可在公众号内进行留言。通过学会审核后方可在线进行支付宝缴纳会费。
单位会员:
关注学会微信:中国指挥与控制学会(c2_china),回复“单位会员”获取入会申请表,按要求填写申请表即可,如有问题,可在公众号内进行留言。通过学会审核后方可缴纳会费。
长按下方学会二维码,关注学会微信

感谢关注
来源:c2_china 中国指挥与控制学会
原文链接:http://mp.weixin.qq.com/s?__biz=MzA4ODcwOTExMQ==&mid=2655586939&idx=6&sn=248a5bed3eb334410116a4a51d271885&chksm=8b9ba8e3bcec21f5f1af0183e2d06f65293f66783f6d71d97c116847758d8862eab54fe10483&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
仿生机器人系统: 建模、设计、控制和感知
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况

科普一分钟 | 仿生机器人太空当“捕手”
深圳先进院AIE纳米仿生机器人研究取得重要进展

仿生机器人技术应用的春天来了么?| CNCC2021
中医运动医学保驾护航 中国健儿里约赛场拼搏扬威




CICC科普栏目|逼真到让人震惊的德国仿生机器人!
马林看望第十七届青少年机器人竞赛北京队参赛师生




仿生机器人技术及航天应用
关于仿生机器人Festo的研究


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号