科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-08-03
来源:PaperWeekly
作者丨孙明珊
Grid R-CNN 是一种将传统两阶段检测算法中对于矩形框坐标回归转换成由 FCN 构建物体网格点的方法,由于同一水平线上网格点的互相纠正作用以及相邻网格点空间信息的融合,其探测结果质量高。然而,其速度并不理想,因此 plus 版本在该基础上作了速度和精度提升。
在 Grid R-CNN 中对于一个物体来说,它所有的网格点共享一个相同的特征表达区域,并且此区域过于冗余。为此,Grid R-CNN Plus 将网格分支的输入尺度从原来的 56x56 降低为 28x28,对于每个网格点,新的输出代表了原来大概四分之一的区域,该方法较 Grid R-CNN 不仅提升了速度还提升了精度,除此之外,还从网格分支网络的结构减重、RoI 采样策略以及 NMS 等方面下手来提升模型速度。
研究方法
Grid R-CNN回顾
 Grid R-CNN 这篇论文由商汤提出,主要对 Faster R-CNN 框架中定位框回归支路的更改,将以往通过回归方式实现 proposal 位置修正的方法,改为通过全卷积网络来实现目标定位框的精确修正。如上图 (b) 的 3x3 个点,网格点的位置由像素级确定。因此,较之前的回归算法,网络就可以获得更多监督信息。但是由于点位置的预测和局部特征没有直接的关系,比如矩形框左上角的点和其相邻的背景区域点拥有类似的特征,也就是超出物体的角点像素的局部特征相似性。针对上述问题,采用了多点监督的方式,通过在一个网格中定义目标点,可以获得更多信息来减少一些由于单点监督导致的不准确性。比如左上角的点可以由上边界中点和左边界中点进行校准。除此之外,为了充分利用网格点的信息,提出了一种信息融合的策略。具体来说,对一个网格点来说,其多个相邻点的特征会被融合成一个特征图,这个融合后的特征图用于相应网格点的预测,使网格点的位置更加精准。最后,为了弥补真实网格点超出 proposal 范围的问题,将 proposal 区域扩大以包含绝大多数网格点,扩大的计算公式由下图左边方式转换成右边方式:
Grid R-CNN 这篇论文由商汤提出,主要对 Faster R-CNN 框架中定位框回归支路的更改,将以往通过回归方式实现 proposal 位置修正的方法,改为通过全卷积网络来实现目标定位框的精确修正。如上图 (b) 的 3x3 个点,网格点的位置由像素级确定。因此,较之前的回归算法,网络就可以获得更多监督信息。但是由于点位置的预测和局部特征没有直接的关系,比如矩形框左上角的点和其相邻的背景区域点拥有类似的特征,也就是超出物体的角点像素的局部特征相似性。针对上述问题,采用了多点监督的方式,通过在一个网格中定义目标点,可以获得更多信息来减少一些由于单点监督导致的不准确性。比如左上角的点可以由上边界中点和左边界中点进行校准。除此之外,为了充分利用网格点的信息,提出了一种信息融合的策略。具体来说,对一个网格点来说,其多个相邻点的特征会被融合成一个特征图,这个融合后的特征图用于相应网格点的预测,使网格点的位置更加精准。最后,为了弥补真实网格点超出 proposal 范围的问题,将 proposal 区域扩大以包含绝大多数网格点,扩大的计算公式由下图左边方式转换成右边方式: 总而言之,Grid R-CNN 的三个创新点:
总而言之,Grid R-CNN 的三个创新点:多点监督策略
网格点特征融合策略
增大区域映射
网格点特定表示区域对于 Grid RCNN Plus 来说,对速度提升效果最明显的就是网格点的特征表达区域,只有正样本(IOU>0.5)才会被送入 Grid branch,因此有些真实标签会被限制在监督图的一个小区域内。如下图所示: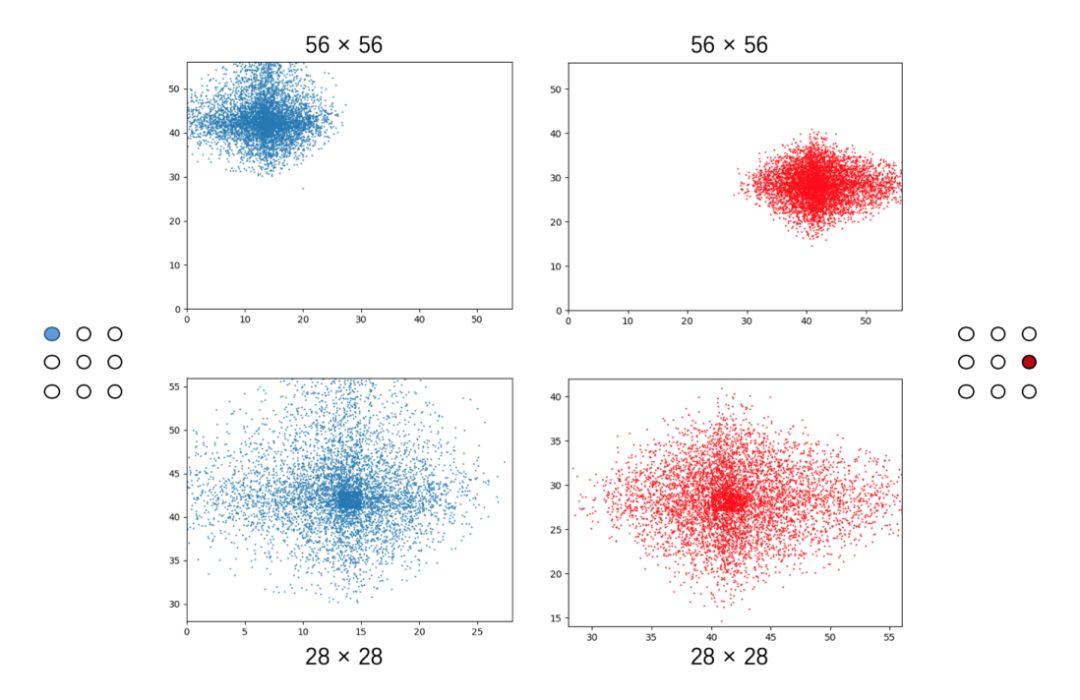
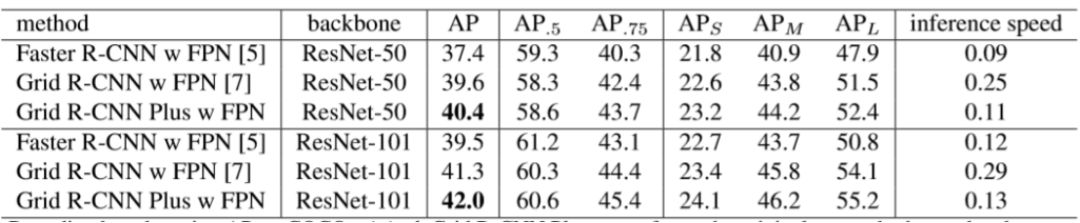 与 Faster R-CNN, Grid R-CNN 在 COCO 数据集上的结果如上表所示,可见精度和速度都有提升,可见这些策略是有效果的。总结
与 Faster R-CNN, Grid R-CNN 在 COCO 数据集上的结果如上表所示,可见精度和速度都有提升,可见这些策略是有效果的。总结原版的 Grid R-CNN 对 Faster RCNN 做了很多精度上的优化,但是速度却慢于 Faster R-CNN,于是 Grid R-CNN Plus 就速度优化在四个方面进行了改进:
来源:paperweekly PaperWeekly
原文链接:http://mp.weixin.qq.com/s?__biz=MzIwMTc4ODE0Mw==&mid=2247498682&idx=2&sn=90b9e9f541cc8d06ad4d0f000d6d2c1f&chksm=96ea243aa19dad2c233a7414be269755f7b995ebae4f46d489896a9c330d06c8092077e496fe&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
量子增强机器学习:量子经典混合卷积神经网络
卷积滤波器
反卷积
非线性卷积层

【解析】图网络深度解析:为什么说图网络是AI的未来?

后ResNet时代:SENet与SKNet

KDD20 | AM-GCN:自适应多通道图卷积网络
图解丨卷积神经网络数学原理解析

卷积学习与图像识别的技术发展

谷歌首个AI版Doodle:向伟大作曲家巴赫致敬


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号