科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-08-06
随着人类对海洋资源的探索、开发和利用越发迫切,研究和发展仿生智能水下航行器成为近年来全球海洋科学领域的一大热点。日前,由西北工业大学研制的滑扑一体自主变形仿生柔体潜航器成功进行首航,标志着我国在高性能仿生智能水下航行器的研制方面迈出重要一步。
自主变形仿生柔体潜航器是科技部重点支持的研究项目,以蝠鲼为仿生原型,采用交替性滑翔与扑动的滑扑一体推进模式,在水中具有高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。
滑扑一体自主变形仿生柔体潜航器项目负责人、西北工业大学航海学院院长潘光对记者说,开展滑扑一体水下推进技术研究,使潜航器兼具水下航行器的高机动能力与水下滑翔机的长续航能力,可有效解决现阶段我国传统潜航器存在的机动性、隐蔽性和续航时间综合能力不足的问题。
这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的滑扑运动姿态。
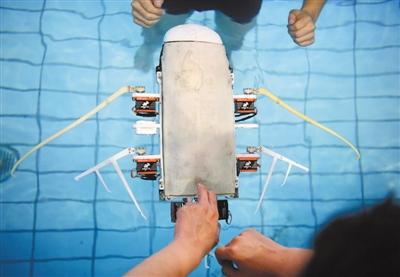
原理验证样机在西北工业大学的游泳池内展示扑动前进(8月3日摄)。
8月3日,西北工业大学研究团队的学生在调试原理验证样机的内部骨架。新华社记者 邵瑞摄
内容来源:科技日报来源:科技日报
原文链接:http://digitalpaper.stdaily.com/http_www.kjrb.com/kjrb/html/2019-08/06/content_427228.htm?div=-1
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

仿生手点燃杭州亚残运会主火炬!智能假肢为残障人士带来无限可能

南工大陈苏团队AM:离子型仿生智能驱动研究新进展

合肥工大等研发高性能仿生智能水凝胶

苏州纳米所在仿生人工肌肉和压电传感器研究方面取得新进展

综述:仿生智能驱动器研究进展

受“植物卷须”启发,智能仿生机器人研制成功

DARPA发布微型仿生机器人人工智能网络计划信息征询书

苏州纳米所发表关于智能仿生感知系统的柔性人工突触器件的综述文章
前沿动态:可修复的智能自供电仿生皮肤

华东师范大学:“不知疲倦”的仿生智能薄膜问世


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号