科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-08-07
来源:中国电子学会

研究人员让变形机器人折叠成一朵“花”,“花瓣”甚至可向不同的方向弯曲。
图片来源:北卡罗来纳州立大学
最新一期美国《科学进展》杂志发表了一项工程学研究:美国一个联合研究团队报告称,他们成功开发出一种可远程控制的变形机器人,材料能够由“刚”到“柔”,按照人类的想法改变形状,最后还能以新的形状再恢复“刚”性。这一特殊的机器人未来有望在生物医学和航天领域得到应用。
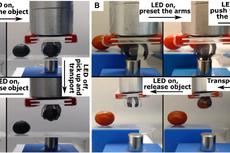
这种奇特的机器人由美国北卡罗来纳州立大学和埃隆大学的研究人员联合研发,机器人由嵌有磁铁微粒的聚合物构成,可受外部的光和磁场控制。在正常条件下,这种材料表现出的特性是相对刚性的,但只要通过发光二极管加热,材料就会变得很柔软,此时再利用磁场进行远程控制,就可以按需要改变机器人的形状。而一旦停止加热后,机器人的材料会恢复刚性,且固定成为新的形状。
在实验测试中,研究人员让这种机器人“变形”,制成用于提起和转运物体的“抓手”,也制成了悬臂。同时,研究人员还展示了如何将这种机器人折叠成一朵“花”,“花瓣”甚至可向不同的方向弯曲。
研究团队开发了一个设计软件,用于控制和调整机器人的形状、材料厚度以及磁场强度和方向等。
变形机器人凭借多样的功能性和强大的适应性,在众多领域中都将有重要应用价值。美国北卡罗来纳州立大学材料科学和工程学教授、论文通讯作者乔·特拉西说,新研发的这种机器人不但可以远程控制运动,也能使其变化为特定形状,最后还能使其恢复原状,可反复进行操作。这一特点未来有望在生物医学和航天领域发挥巨大潜力。
(来源:科技日报)
来源:cieinfo 中国电子学会
原文链接:http://mp.weixin.qq.com/s?__biz=MzA4MTgwMjkyNw==&mid=2657300248&idx=3&sn=b28d695be7984ad600062279b91f6e30&chksm=8418ecd8b36f65cee9fd7fd3c334c2130157616a717b5d475b548bf082da30eafaf84d5c22db&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
远程控制癌症免疫疗法
用磁场和光远程控制软机器人
机器人造机器人,噱头or风向?

利用磁场可远程控制化学反应

ACS Nano:光热效应远程控制水凝胶液化,控制释放负载物

快讯|雷神公司的远程控制器可操控美国海军所有无人机,普渡大学研发出蜂鸟机器人等

快讯丨人形机器人Reachy可被VR远程控制;九号公司配送机器人在广州法院上岗;日本首款手术辅助机器人成功实施第一例手术等

中科大对南极望远镜实现高效远程控制

科技 | 神奇软体机器人:哈佛可穿戴式软体康复机器人问世

新方法远程控制运动员身体负荷


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号