

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
2019年7月4日,一则新闻震惊了世界。俄罗斯官方透露,一艘军用核潜艇于7月1日在巴伦支海发生严重火灾。俄罗斯总统普京已要求国防部长绍伊古确保海洋的安全。——显然,世界上又发生了一起严重的海洋事故,而且是海洋事故中最棘手的类型:核潜艇事故!它不仅危及到艇上人员的安全,更有可能会引发核泄露,甚至在大国猜忌的情况下可能会引发战争。
让我们把时钟的指针拨到1963年4月10日。这一天,美军攻击型核潜艇“长尾鲨”(USS Thresher,舷号SSN-593)在科德角东南部进行深潜试验时沉没,官兵和技术工作人员总计129名全部遇难。这是人类海洋科技和海军发展历史上的第一次危难,也是死亡人数最多的一次核潜艇事故。事故的原因是什么?有人说是苏联的破坏,有人说是设计失误,有人说是机械故障,也有人说是操作不当……因此,核潜艇事故之谜,成为了世界的焦点。1963年8月18日,一艘深潜器披挂上阵去寻找答案,它就是“的里雅斯特”号深潜器。

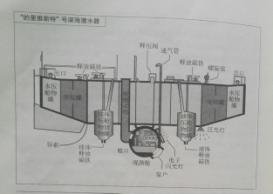
上图中,左边是“的里雅斯特”实物,右边是其结构工作原理。从图中可以看出,“的里雅斯特”深潜器的结构很巧妙,也很“科学”。它由球体和漂浮体两大部分构成。球体是驾驶舱,驾驶员在这里进行操作;当然,在那个年代,驾驶舱里没有什么触摸屏之类高大上的控制设备或零部件,除了操纵杆按钮和模拟电子仪表盘外,操作装置类似老式拖拉机。球形驾驶舱上方是漂浮体,是由存储着庚烷(一种类似汽油的轻质油)的庚烷室,和存储着几吨小铁球的球体压舱储物罐这两部分构成。吊机将潜水器放到海里后,驾驶员操纵打开阀门,庚烷从舱室流出,海水进入舱室,整个潜水器重量增加,就可以下沉。根据海水注入的多少,就可以控制下沉的速度。当潜水器需要上浮时,需要打开球体储物罐的门,断掉吸附铁球的电磁铁,铁球从罐里漏出,潜水器重量变轻就会上浮。这个潜水器的简单工作原理过程实际上与高空气球上升下降有些类似。(潜水器的发明制造者奥古斯特.皮卡尔也设计制造了世界上第一个带有压力舱的探空气球。)
“的里雅斯特”深潜器看起来很“笨拙”甚至粗陋,但实现了历史创举。1960年,它成功下潜到海洋的最深处:10916米深的马利亚纳海沟底部,并顺利返航。1963年,协助完成事故核潜艇“长尾鲨”的事故调查和打捞工作。它的工作证实了“长尾鲨”号沉没的原因是由于水管的泄露和设计本身的缺陷。
“的里雅斯特”号是第一代载人深潜器,“长尾鲨”核潜艇事故打捞后,便退役进入博物馆。取而代之的是新一代载人深潜器“阿尔文”号,以及无人深潜器。
“阿尔文”号被称为 “世界上首艘可以载人的深海潜艇”,它比“的里雅斯特”号的灵活性高了许多,其运动空间不限于垂直和平面两个方向,是三维空间运动。20世纪70年代,“阿尔文”号为一些海洋探索的专家们所推崇;但是,这样的载人深潜器或者潜艇,造价昂贵,体积庞大,且不能涉入有危险的地方,如狭窄的峡谷……因此,后来出现了一些造价低廉、轻便小巧,适合大量生产的无人深潜器,也就是水下机器人。
水下机器人,根据它与母船之间是否有电缆,可以分为有缆和无缆两种。有缆水下机器人,也称之有缆水下遥控机器人,即我们所说的ROV,母船通过电缆向水下机器人提供动力和完成遥控控制;无缆水下机器人,称之为AUV,自身带有动力能自由航行作业。
最早的水下遥控机器人是1953年诞生的,但1966年美军西班牙外海CURV成功回收氢弹才是历史的转折,这是真正激发世界各国发展研究遥控机器人的热情的动力来源。20世纪70年代发生世界石油危机,陆地石油产业大规模转向海洋发展,石油和天然气行业大规模使用有缆遥控水下机器人,即ROV,并由此产生一个所谓的“ROV Industry”产业部门。有了ROV,很多工作科技人员不必亲自到海洋和水下,既可以在比较安全和舒适的水面母船或平台上进行科学研究工作,也可以通过无线系统在远离海洋的陆地实验室工作;海洋石油的生产中的一些监控、搬运、安装、拆卸、回收等水下井下作业ROV可以独立或者配合人较快的完成,这属于ROV的“轻体力活”;而凭借脐带电缆提供的强大动力从事海底挖沟、埋设电缆等“重体力活”也能顺利完成。随着技术的发展,ROV基础上,世界各国发展出AUV(Autonomous Underwater Vehicle,自主水下机器人)和ARV(Autonomous & Remotely operated Vehicle,自主/遥控水下机器人)。下图是世界上已经研制成功并在使用的ROV和AUV产品。



国外快速发展的上世纪七十年代,我国也开展了相关工作并取得一些成果。中船701研究所最早研制成功用于打捞水下沉物“鱼鹰”号载人潜水器,后来又发展了“蓝鲸号”;还进行了类似美国人曾经的水下对接试验:“7103”深潜救生艇与潜艇对接并转移艇员,这是中国载人潜水器发展上的一个标志性事件。我国第一台ROV“海人一号”,1986年由中科院沈阳自动化所和上海交通大学联合完成。上世纪90年代初,沈阳自动化所研发的1000米“探索者”自主水下机器人、6000米“CR-01”和“CR-02”6000米自主水下机器人,哈尔滨工程大学研制了“智水”系列,则是我国第一批AUV。2003年起,我国又成功研制多型ARV自治/ 遥控水下机器人(Autonomous Remotely Vehicle,ARV),在水下安保、北极科考中得到了成功应用。2015年正式投入使用潜深4500米的“海马号”ROV,是由上海交通大学、浙江大学、青岛海洋化工研究院、同济大学和哈尔滨工程大学等共同联合研制完成的;是中国自主研发的下潜深度最大、国产化率最高的无人遥控潜水器系统,具体实物设备产品见下图。


“海马号”长4米、宽2.1米、高2.6米、重5吨国产化率非常高的水下机器人,是二十一世纪第二个十年里具有重大里程碑意义的科技成果 ,它在水下布缆、海洋勘测(如沉积物取样、热流探针探测、海底拍摄)及海洋水下智能网络布防等方面具有重要应用价值和工业、国防战略价值。
进入新世纪,国内众多科研机构设计制造了很多潜深程度不一样、运动形式不一样的遥控水下机器人(如浮游、纯爬行、海底攀爬、海底车驶等),技术水平与发达国家的同类差距也不大。“十三五”期间,中科院沈阳自动化所、上海交通大学上海海洋大学等正在研制万米级的混合型机器人。围绕海斗深渊科考研制的全海深ARV关键技术平台——“海斗号”已实现万米下潜。中国的深潜机器人,正步入世界无人深潜俱乐部的第一梯队行列。
现在,回到我们本文开始,如果遇上俄罗斯核潜艇事故和类似事情发生,ROV能否排上用场?实际上,ROV是敞开或者半封闭的机电设备系统(如上图“海马号”),在小范围内作业灵活性和下潜深度都很强。在结构组成以及材料等方面的优势,使得当前的ROV有着远超核潜艇的潜深。而且ROV本身具有较好的“外挂传感器”和机械手等设备,探测和工作比较便利和灵活。所以,核潜艇这类事故发生时,想及时了解甚至处理解决一些问题对于ROV来说是完全可以和能够做到的。特别指出的是ROV的操控电力电能来源于水面母船,这也让ROV有足够的工作时间来应对一些复杂情况。因此,ROV可能是核潜艇事故应对中到达的第一波救援力量。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号