

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
极轴太阳跟踪是双轴跟踪方式的一种,聚光器两旋转轴中一轴的方向与地球自转轴方向平行,另一轴与前一轴正交并相对于镜面固定,聚光装置绕双轴做二维旋转运动,跟踪太阳运动并将太阳辐射会聚到目标靶。
定义双轴跟踪方式的一种,聚光器两旋转轴中一轴的方向与地球自转轴的方向平行,另一轴与前一轴正交并相对镜面固定,聚光装置绕双轴做二维旋转运动,跟踪太阳视运动并将太阳辐射会聚到目标靶。1
相关原理太阳高度角、方位角可由当地纬度角、太阳赤纬角和时角确定,在纬度一定的情况下,可由时角与赤纬角确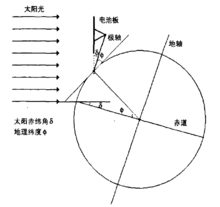 定高度角与方位角。因此,极轴式跟踪可以在保证跟踪精度的基础上,将太阳能板的椭圆跟踪轨迹转化为绕旋转轴(极轴)的旋转跟踪太阳平时角,以及俯仰角跟踪太阳赤纬角。
定高度角与方位角。因此,极轴式跟踪可以在保证跟踪精度的基础上,将太阳能板的椭圆跟踪轨迹转化为绕旋转轴(极轴)的旋转跟踪太阳平时角,以及俯仰角跟踪太阳赤纬角。
如图1所示,将太阳能板的旋转轴(极轴)调整至与地轴平行,其安装角即为当地纬度角Φ,此时可以通过极轴旋转抵消地球的自转。同时为保证太阳电池板能与太阳光垂直,使电池板与极轴夹角为太阳赤纬角δ。经过计算可以证明,极轴式跟踪一天之内太阳能板的俯仰角变化不大于0.4°。如图2所示,如按半月调节一次计算,光强减弱程度不足0.5%,故俯仰角可以周期性机械调节俯仰角,将二维运动转化为一维,可少使用一台电机,最大程度简化了系统的机械结构,降低了系统的制作与运行成本。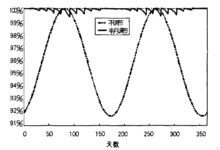
双轴跟踪双轴跟踪系统是一种能够保持太阳能电池板随时正对太阳,使太阳光的光线随时垂直照射太阳能电池板的动力装置。
跟踪控制系统使用两种跟踪控制方式,其一为光控,即使用光传感器,跟据天空不同区域光线强弱区别,判断太阳位置,然后驱动电机转动支架进行追踪。其二为时控,根据当地经纬坐标和时间,利用天文学计算公式,计算太阳所处天空的坐标,然后驱动电机转动支架进行追踪。
国内公司多将两种控制原理结合,时控为主,光控为辅,即天气良好的情况下,利用时控追踪太阳大约位置,然后利用光控进行精确调节,天气条件不好的情况下,单独利用时控进行追踪,避免天空杂光干扰。另外也可以采用另一种结合方式:仍然以时控为主,光控为辅,即天气良好的情况下,单纯利用光控进行追踪,如果遇到阴雨天气,则自动转跳到时控方式进行追踪。时控方式中,使用GPS 模块来获取当地的经纬度和时间。保证坐标和时间的精度,从而提高追踪精确程度。
极轴跟踪结构机械结构的实现运动机构部分主要通过类似万向节的双轴结构,其中极轴是轴可动,轴承不可动。通过步进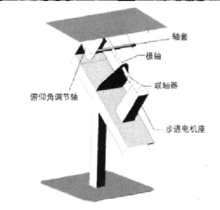 电机连接减速器带动极轴转动,连同电池板一起转动,以抵消地球自转。
电机连接减速器带动极轴转动,连同电池板一起转动,以抵消地球自转。
俯仰角调节轴是轴不可动,轴承可动,轴通过轴套与极轴固定,随极轴转动,而通过轴承的转动调节俯仰角,抵消赤纬夹角。在机械结构上采用两根螺钉对顶的方式实现对俯仰角的调节,通过量角器确定赤纬角。如果需要进行高倍聚光对跟踪精度提出更高要求,可以在俯仰角调节轴上安装电机来带动轴套转动,实现二维跟踪。
极轴与地平面的夹角也就是安装角,应与当地纬度角相同。该角度由设计决定,加工成型后不再改变,如有偏差,可通过调节底座的安装角度进行补偿。
机构顶部可以安装电池板,也可以安装聚光机构。机构机械简图如图3所示。2
特点跟踪装置的一轴指向天球北极,即与地球自转轴相平行,故称为极轴;另一轴与极轴垂直,称为赤纬轴。工作时电池板绕极轴运转,其转速的设定与地球自转角速度大小相同方向相反用以跟踪太阳的时角变化;电池板绕赤纬轴作俯仰转动是为了跟踪赤纬角的变化。这种跟踪方式并不复杂,但在结构上电池板的重量不通过极轴轴线,极轴支承装置的设计比较困难。
本词条内容贡献者为:
曹慧慧 - 副教授 - 中国矿业大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号