

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
法向反力N与摩擦力F的合力R称为支持面对物体的全约束力,也叫全反力。
简介法向反力(支持力)N与摩擦力F的合力R称为支持面对物体的全约束力,也叫全反力或接触反力。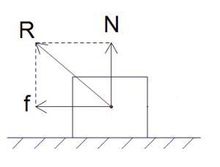
由于支持力N沿支持面法向,摩擦力f沿支持面切向,二者总相互垂直。运用勾股定理,全反力R的大小为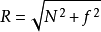 。
。
静摩擦力f达到最大值fmax时,这时的支持力与全反力的夹角a也达到最大值b,把b称为最大静摩擦角。此式表明:最大静摩擦角b的正切等于最大静摩擦因数。而动摩擦角的正切等于动摩擦因数。
计算公式法向反力N与摩擦力F的合力R称为支持面对物体的全反力。 即摩擦力F达到最大值Fmax时,这时的夹角a也达到最大值b,把b称为摩擦角。
tanb=F/N=fN/N=f 此式表明:摩擦角b的正切等于静摩擦因数。 如果作用于物体的主动力的合力Q的作用线在摩擦角之内,则无论这个力怎样大,总有一个全反力R与之平衡,物体保持静止;反之,如果主动力的合力Q的作用线在磨擦角之外,则无论这个力多么小,物体也不可能保持平衡。这种与力大小无关而与摩擦角有关的平衡条件称为自锁条件。物体在这种条件下的平衡现象称之自锁现象。1
相关区别摩擦角:当物体处于滑动的临界状态时,静摩擦力FS达到最大值Fmax,此时FR 与FN 的夹角也最大,此时的φm 称为摩擦角。物体恰好能从粗糙斜面上匀速下滑时斜面的倾角称为摩擦角。如果测得这个角度就能确定物体与斜面之间的动摩擦因数,即μ=tanθ。不过用这种方法测定摩擦因数有一定的难度,因为物体是否真正作匀速运动,依靠目力是难以辨别的。我们发现在变速运动的情况下也可以引入摩擦角,只要量出角度就能得到摩擦因数,从而可以避免判定速度是否均匀的困难。
法向反力N与摩擦力F的合力R称为支持面对物体的全约束力,也叫全反力。法向反力(支持力)N与摩擦力F的合力R称为支持面对物体的全约束力,也叫全反力或接触反力1。
应用自锁现象
如果作用于物体的主动力的合力Q的作用线在最大静摩擦角之内,则无论这个力怎样大,总有一个全反力R与之平衡,物体保持静止;反之,如果主动力的合力Q的作用线在最大静摩擦角之外,则无论这个力多么小,物体也不可能保持平衡。这种与力大小无关而与最大静摩擦角有关的平衡条件称为自锁条件。物体在这种条件下的平衡现象称之自锁现象。
动态受力平衡的分析
动态平衡问题中,光滑平面上物体受三力而平衡,我们通常运用三角形定则,采用绘制重力(方向、大小一定)、支持力(方向一定)、外加力三个力的矢量三角形,的方法,进行研究,解决一些诸如求外力大小的极值、已知外力角度求外力大小等问题。而在粗糙平面上,物体还收到一个摩擦力,对于四力平衡无法继续使用力的矢量三角形法。这时如果适当运用全反力的知识,便可以将四力转化成重力(方向、大小一定)、全反力(方向一定)、外加力三力平衡来解决。
例:质量为m、电量为+q的物块置于动摩擦因数为μ的水平面上,加一电场使其恰能向右做匀速直线运动,求所加电场场强的最小值及此时的方向。
如图,物块向右匀速运动时,所受电场力F=qE,全反力R与竖直方向夹角φ=arctanμ。由几何关系(垂线段最短)可知,当F⊥R时F的大小最小,此时E=F/q=mgsinφ/q=mgμ/[q√(μ^2+1)],方向与水平方向夹角θ=φ=arctanμ。
若不采用全反力模型,也可以将四力分解到水平、竖直两个方向上分别列出平衡方程,再依据方程组求出F关于θ的函数,利用三角函数的性质求最值。该方法较繁琐,在此不作赘述。2
本词条内容贡献者为:
石季英 - 副教授 - 天津大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号