

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
同步状态机相对于控制器,它将一项功能完成分成若干步骤,每一步对应于一个二进制的状态。
同步状态的搜索与接收系统定时巴克码的检测
同步状态的搜索是在对巴克码检测的基础上实现的。我们采用7位移位寄存器、加法器和比较器实现巴克码的检测。实现原理如图1所示。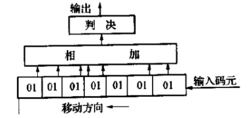
根据7位巴克码识别器原理图,采用软件仿真,输入数据流是伪随机的序列,得到仿真波形如图2所示。从图中可以看出,巴克码到来时输出一个尖脉冲,在本系统中此尖脉冲作为同步标志脉冲,通过同步标志脉冲来实现对状态机工作状态控制。
同步状态转移分析在接收端的同步码流中,当检测到帧同步码组时系统就会输出一个同步脉冲。因为码流中总含有与帧同步码字相同的码组,如果这种情况发生了就会产生一个假的同步信号,称为假同步。同样,系统由于受外部的干扰,同步码组的某一位或者几位出现传输错误,在接收端就检测不出这样的同步码组,系统判为失步,这叫假失步。稳定的同步系统应该尽量减少以上两种情况的发生。通常采用前方和后方保护电路来减免这种情况的发生。
通过以上分析,把同步过程分为同步态和捕捉态。在接收端,一旦检测到帧同步码组,则用它对接收定时系统复位。然后经过三帧校核,如仍能检测出帧同步码组,就确定系统已经进入同步态;如不存在帧同步码组,则判断开始检出的是假帧同步信号,系统再以下一个检出的帧同步码组开始,重新进行捕捉。系统已经处于同步态时,为了避免出现假失步,也要进行三次校核,如果连续四次丢失同步信息,系统就进入捕捉态。状态转移如图3 所示。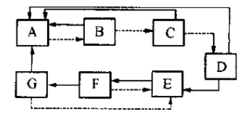
图3中,虚线箭头表示在规定时刻没有捕捉到同步码,实线箭头表示在规定时刻捕捉到同步码。1,2,3,4 为同步态,其中2,3,4 为校核状态,5,6,7 为捕捉校验态。
下面以同步校验态为例说明状态的转移情况,当系统进入同步状态1 后,在下一个定时时刻没有捕捉到同步码,这时系统进入2 状态,如果在2 状态下,下一个定时时刻检测到了同步码,判为假失步,系统重新回到同步态1;如果在定时时刻没有检测到同步码,则系统进入3 状态;在3 状态的下一个定时时刻检测到了同步码,系统返回同步态1;同理,没有检测到同步码字,系统进入4 状态。其它状态之间的转移也可以在图3中分析得到。
状态机的控制与编码状态转移的控制采用两个状态计数器和一个位计数器来实现。由巴克码识别器输出的同步检测信号作为状态计数器1的触发信号,每来一个同步检测信号,状态计数器1 就加1,同时输出同步脉冲。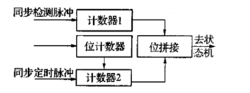
由位计数器和同步定时脉冲作为状态计数器1的触发信号。位计数器以同步检测脉冲为基准,第一个同步检测脉冲到来时,位计数器置位,并产生同步定时脉冲。每当位计数器计到同步脉冲应该出现的时刻,这时无论实际的同步检测脉冲是否出现,都会输出一个同步定时脉冲。这样两个状态计数器的结果就可能不同,只有在同步检测脉冲没有丢失时才是一致的。当同步检测脉冲丢失时,两个状态计数器的结果就会有差别,这种差别反应了同步状态机各个状态的变化。因此,如图4 所示,两个状态计数器的输出经过位拼接后作为同步状态机的输入1,以此来实现对状态机状态转移的控制。
状态编码状态机是由组合电路和时序电路构成的硬件时序电路。状态的转移取决于当前的状态和状态机的输入,这种状态机为米里型状态机;状态的转移只取决于当前状态的称为莫尔型状态机。莫尔型状态机可以看作是米里型状态机的一个特例。
本词条内容贡献者为:
何星 - 副教授 - 上海交通大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号