

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
远动终端是电网监视和控制系统中安装在发电厂或变电站的一种远动装置,简称RTU。RTU采集所在发电厂或变电站表征电力系统运行状态的模拟量和状态量,监视并向主站传送这些模拟量和状态量,执行主站向所在发电厂或变电站发送控制和调节命令。1
简介早期的远动终端是由一些分立元件构成的电子设备,它所能采集的信息量很少,功能极为简单。随着集成电路远动终端的产生,它所采集的信息量比分立元件式远动终端有明显增加,实现的功能也有所增强。直到20世纪80年代初,远动终端采用了微型计算机,才使其发展到一个崭新的阶段。现代的远动终端是一个以微型计算机为核心的具有多输入/多输出通道、功能较为齐全的计算机系统,系统中的硬件在程序(软件)的指挥下完成规定的功能。它具有很强的数据处理能力,改变程序比较方便,工作灵活,适应性强。随着电力系统的迅速发展,对电网的监视和控制要求日益提高。作为采集电网运行数据和执行调度命令的远动终端,其作用也越来越重要。由远动终端提供完备可靠的实时数据,并正确执行控制和调节命令,是实现对电力系统安全、可靠、经济运行的必不可少的手段之一。
总之,RTU技术近20年来得到了迅速发展,从继电器逻辑、集成电路到今天的微机远动装置,从单CPU的集中式远动终端到多CPU的分布式远动终端,从直流采样到交流采样等都代表了当今科学技术的进步。1
远动终端单元RTU的功能远方终端RTU(也常称为远动终端)是电网调度自动化系统基础设备,它们安装于各变电站或发电厂内,是电网调度自动化系统在基层的“耳目”和“手脚”。RTU采集所在发电厂或变电站表征电力系统运行状态的模拟量、状态量等,监视并向调度主站传送这些量,执行调度主站发往所在发电厂或变电站的控制和调节命令。
1.四遥(1)遥测(Tele-measurement,YC):即远程测量。采集发电厂、变电站的各种运行参数,将采集到的主要参数按规约传送给调度主站。通常,一台RTU可以处理几百个遥测量。
(2)遥信(Tele-indication,YX):即远程信号。采集发电厂、变电站的设备状态信号,将采集到的主要参数按规约传送给调度主站。这些状态信号包括:断路器和隔离开关的合闸或分闸状态、主要设备的保护继电器动作状态、自动装置的动作状态;一些运行状态信号,发电机组开或停的状态信号、远动及通信设备的运行状态信号等。通常,一台RTU可以处理几百~几千个遥信量。
(3)遥控(Tele-command,YK):即远程命令。根据接收到的调度命令,执行改变运行设备状态的命令,如发电机组的启停命令、断路器的分合命令、并联电容器和电抗器的投切命令等。通常,一台RTU可以实现对几十个设备的远方操作。
(4)遥调(Tele-adjusting,YT):即远程调节。根据接收到的调度命令,执行改变运行设备参数的命令,如改变发电机有功出力和励磁电流的设定值,改变变压器分接头的位置等。通常,一台RTU可以实现对几个或十几个设备的远方调节。1
2.数据通信按预定通信规约的规定,自动循环(或按调度端要求)地向调度端发送所采集的本厂站数据,并接收调度端下达的各种命令。
3.其他功能就地功能:就地功能是指RTU通过自身或连接的显示、记录设备,就地实现对电网的监视和控制的能力。对有人值班的较大站点,如果配有监视器、打印机等,可完成显示、报表、打印功能,越限告警功能,事件顺序记录功能,对时功能,转发功能等。
自诊断功能:该功能反映了装置的可维护能力。程序出错死机时自行恢复功能,自动监视主、备通信信道及切换功能,个别插件损坏诊断报告等功能。1
远动终端单元的结构1.单CPU的结构早期的微机化远动终端多为单CPU结构,即所有的数据处理由一个CPU完成,它负责管理其他各模块,各种功能的扩展,如模拟量采集、开关量采集通过输入/输出口实现。图1是单CPU结构的RTU硬件基本构成框图。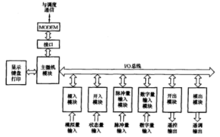
RTU的工作程序和某些固定参数存放在只读存储器,遥测、遥信等数据暂存于随机存储器。模拟量输入(通道)等各模块都通过各自的接口电路与总线连接。屏幕显示器(监视器)、打印机等人机联系设备也通过接口电路与总线相连。MODEM是调制解调器,按通信规约编码组帧后的信息经MODEM送上通信信道,与主站进行远程数据通信。
RTU是实时监控系统中的一个组成部分,显然,RTU运行的软件是实时软件。实时性软件要完成的任务由定时或不定时触发产生,可用中断服务程序来完成。因此,单CPU的RTU软件包括一个主程序和多个中断服务程序。主程序完成对整个系统的初始化和人机联系的功能。中断服务程序完成RTU的输入和输出功能,主要包括实时时钟中断服务程序、A/D结束中断服务程序、字节发送空中断服务程序和字节接收满中断服务程序等。1
2.多CPU的结构较大厂站采集和处理数据较多,单CPU结构难以胜任,此时可采用图2所示的多CPU结构的RTU基本框图。所谓多CPU是指多个CPU分工协作共同完成RTU功能的一种RTU。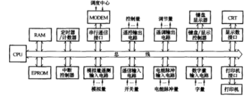
这种RTU由一个主控系统和多个子系统组成,主控系统和每个子系统都带有CPU。子系统中的CPU负责子系统范围内的数据采集或执行命令,并与主控系统的CPU通信;主控系统的CPU负责管理各子系统,并与主站通信以及人机联系。采用多个CPU构成RTU,有利于提高RTU采集和处理远动信息的能力。
每个子系统中的CPU运行相应子系统的软件,这些软件都包括一个主程序和一个或多个中断服务程序。主控系统的CPU软件主要包括与子系统内CPU的通信程序、与主站的通信程序、数据处理程序以及人机联系程序。多个从CPU运行各自的程序,主、从CPU协调工作,共同完成RTU功能所指定的任务。1
3.中断与中断优先权由于RTU的任务对实时性要求较强,所以RTU的任务大多数采用中断方式完成。因此,RTU在实时运行中可以出现多个中断源,故需采用一片8259A来扩展中断输入,使整个系统可扩展到12级中断服务。8085A的中断扩展如图3所示。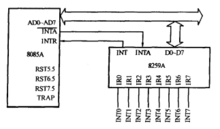
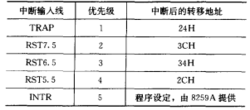
8085A中的五条中断输入线,其优先级别是不相同的。TRAP中断是不可屏蔽的,这是级别最高的中断,它用来处理掉电等最为紧急的事故。RST5.5、RST6.5、RST7.5中断可用SIM指令屏蔽。SIM指令是一条中断屏蔽置数指令,它把累加器数据中的屏蔽标志置“1”或“0”,从而决定该屏蔽标志位所相应的中断请求是否允许。累加器数据中的位0、位1和位2分别相应于RST5.5、RST6.5、RST7.5中断请求的屏蔽标志位,它用RIM指令读入。INTI用来使CPU接受一条由外部电路送到数据总线上的RST指令,并根据该指令转移到相应8个中断服务程序入口之一。INTR也可受8259A的控制,从而直接产生一条调用子程序的CALL指令。CALL指令调用的地址是16位的,经过程序预先安排,它可以指向系统存储器中任一地址的中断处理子程序的入口。8085A中五条中断输入级的优先级及转移地址如图4所示。1
本词条内容贡献者为:
郑国忠 - 副教授 - 华北电力大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号