

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
三点透视是一种绘图方法,一般用于超高层建筑,俯瞰图或仰视图。第三个消失点必须和画面保持垂直的主视线,必须使其和视角的二等分线保持一致。
工程学概念作法一效果图见图1:
1.由圆的中心A距120°画三条线,在圆周交点为V1、V2、V3,并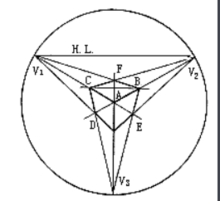 定V1-V2为H.L。
定V1-V2为H.L。
2.在A的透视线上任取一点为B。
3.由 B到 H. L.作平行线,和 A-V1的交点为CA的透视线及C、D至各消失点的透视线得E、F、G完成透视。
作法二1. 在H.L设V1-V2,二等分处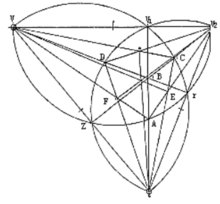 设X。
设X。
2. 以X为圆心画通过V1、V2的圆弧。
3. V1-V2间任设Vc点,画垂线和前圆弧交点为A。
4. 取Vc-A间的任意点B,由V1、 V2通过B延长的透视线和前圆弧交Y、Z点。
5. V1和 Z,V2和 Y连结线的延长在Vc-A的垂直线上相交,为第三消失点V3。
6. V1-V3,V2-V3视为H.L.,反复作图可得C、D点。
7.由A的透视线及C、D至各消失点的透视线得E、F、G完成透视(图2)。
作法三在有角透视图上作正六面体,画对角线。 任意倾斜的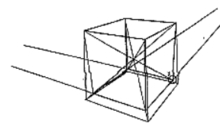 一个边角交点X作为基点,求出透视(图3)。1
一个边角交点X作为基点,求出透视(图3)。1
美术概念基本定义三点透视有三个消失点,高度线不完全垂直于画面。
详细术语根据站点的高低,高度线或消失于天空中的天点,或消失于地面中的地点,另外两组深度线延长与视平线形成两个消失点,消失在地平线上,另一个消失点消失在天空或地面。
基于三点透视的人脸姿态估计算法基于一幅静止图像的人脸姿态估计技术在人脸识别领域中有着重要的实际应用。在人脸识别门禁系统中,要求在距离摄像头20cm到100cm、左右旋转在-45°—+45°、上下旋转在-35°—+35°的范围内获取人脸图像,然后对其进行识别处理。通常该门禁系统需要将当前人脸图像与数据库中的所有人脸图像进行一一比对,既增加了处理时间又增加了误识率。如果在人脸识别系统中加入人脸姿态估计功能,则系统不但可以均匀采集各种姿态的人脸模板,而且还可以根据当前人脸图像的姿态,在具有相似姿态的人脸模板库中进行人脸比对处理,这样可以大幅度提高系统的识别速度,同时也可降低误识率。
基于静止图像的人脸姿态估计方法可分为几何模型法、模板匹配法、非线性回归法、特征空间描述法和检测器阵列法等五大类。
几何模型法几何模型法使用几何结构来描述人脸建立模型与人脸的对应关系。主要有基于五个特征点的交比模型、弱透视投影模型等方法。几何模型法的优点是算法简单,速度快,对特征点的精确定位是个关键处理。Horprasert2的算法利用了四个眼角点以及鼻尖点之间的结构关系,通过计算眼角连线与轴的夹角求得平面内绕轴的旋转角度,通过眼角点的交比射影不变性来求得人脸左右旋转角度,通过鼻子与眼睛的长度之比求得人脸上下旋转角度;该方法只适用于人脸单独上下旋转或者单独左右旋转,算法建立的模型没有充分考虑混合姿态的情况提出了基于弱透视原理和人脸统计模型的人脸姿态估算法,即将眼角线中点与嘴角线中点的连线作为人脸对称轴,利用人脸统计模型参数在对称轴上找到鼻下点,并设从鼻下点指向鼻尖点的向量为人脸方向,从而求得人脸姿态;该算法比较适合小角度变化的人脸姿态估算,当旋转角度较大时,眼睛线中点与嘴角线中点的连线不能近似作为人脸对称轴来使用,此时找到的鼻下点坐标误差较大,影响人脸姿态的估算。利用在三维世界坐标中不相交的平行线,由于透视原理在二维图像平面内会相交于灭点的原理,提出了基于眼角线与嘴巴线的长度比例关系的人脸姿态算法;其缺点是当旋转角度偏大时,会无法求得外眼角的坐标,从而使算法失效的方法是建立人脸结构模型,对图像进行归一化处理,并找到图像特征点位置信息与人脸姿态之间的对应关系据此计算出人脸姿态;该方法的缺点在于人脸到摄像机的距离必须是固定的,没有考虑任意位置的人脸姿态估计。
模板匹配法模板匹配法是将图像与样本模板进行比较,找出最接近的姿态对每个人采集张不同姿态图像作为模板在姿态估计时将输入图像与模板进行匹配,找到大致姿态。这种方法的假设前提是有问题的,实验表明两幅人脸图像的相似度与人脸姿态的相似度不一定是对应关系。换言之,用该算法有时会得出,同一个人的不同姿态会比不同人的相同姿态的相似度更高。
非线性回归法非线性回归法是通过机器学习,建立一个从三维到二维的非线性映射函数来估计人脸姿态。高维数据进行降维处理后,用支持回归向量求出非线性回归方程。使用两个多层次神经网络方法来得到姿态这种方法受人脸定位误差和图像质量变化的影响很大。
特征空间描述法特征空间描述法假定在某些特征空间上,人脸姿态与某些特定的特征信息有对应关系,并可以通过训练来找到该对应关系。提出了构造全局特征空间和局部特征空间的方法,先在全局特征空间中确定图像属于哪一个人再在该人的局部特征空间中确定人脸姿态该算法的准确度与训练样本,以及用于描述人脸的特征空间有关,得到的实验结果不稳定。
检测器阵列法该方法使用个检测器来检测在个自由度上的人脸姿态该方法的缺点是,为了估算各种不同的姿态,理论上讲就必须训练出各种不同姿态的分类器。
透视变换法利用空间点的透视变换原理提出了一种基于特征点透视变换和人脸统计模型的人脸姿态估计法:将三点透视的姿态估计算法运用在人脸姿态估计上。算法建立以左右眼睛点和鼻尖为几何特征点的人脸统计模型,推导出这个特征点在图像平面坐标系和世界坐标系间的对应关系,根据这个关系可以得到从图像平面上的个特征点来估算人脸在三维空间姿态的理论方程组。由于这个方程组的显式解难以求得,我们采用迭代方法来给出完整的快速人脸姿态估计算法。在图像库上的实验结果表明,算法左右旋转平均误差约为6.9°,上下旋转误差约为3.1°,单张图像的处理速度约为5ms。3
本词条内容贡献者为:
李晓林 - 教授 - 西南大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号