

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
角度校正可消除直线电机等的位置角度误差,采用不受位置角度影响的输入量对位置角度进行校正。校正过后,直线电机可以实现对力矩电流的精确控制,而且位置角度误差能够被校正。
概念角度校正方法应具备以下步骤:①基准球测量步骤,通过机械的传感器,在放置在工作台的一个基准球的指定移动轴方向位置,沿测量轴方向在基准球上扫描取得测量轴方向形状信息,在工作台的直线移动得到的同一基准球的多个不同指定移动轴方向位置进行该取得;②峰值检测步骤,检测上述形状信息的峰值点,对上述各形状信息进行该检测;误差信息取得步骤,求出关于表示基于各峰值点的位置信息的工作台实际移动方向的实际直线与表示工作台理想移动方向的理想直线间的倾斜度的信息;③校正用信息取得步骤,求出校正实际直线倾斜引起的测量轴方向位置信息的测量误差的校正用信息;校正步骤,基于校正用信息校正传感器得到的测量轴方向位置信息。
一种纸币倾斜角度校正方法纸币高速通过清分机时所采集的图像,一定程度上存在纸币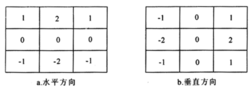 位置倾斜现象,因此在图像处理系统中,都不可避免地需要对采集获得的图像进行倾斜度校正预处理,否则会给后面的图像分割、字符识别等图像分析处理带来一定的困难,影响图像的识别效果。倾斜校正能否快速准确的完成同样也会对后续工作有着重要的影响。
位置倾斜现象,因此在图像处理系统中,都不可避免地需要对采集获得的图像进行倾斜度校正预处理,否则会给后面的图像分割、字符识别等图像分析处理带来一定的困难,影响图像的识别效果。倾斜校正能否快速准确的完成同样也会对后续工作有着重要的影响。
图像倾斜校正过程中,如何检测纸币图像的倾斜角是校正技术的核 心。比较流行的图像倾斜度校正方法主要有:基于Fourier变换的方法、基于K一最近邻簇的方法、基于投影的方法和基于Hough变换的方法等。但是上述方法计算速度慢,不能满足纸币清分机对图像的实时性处理要求。本文研究了一种Sobel算子边缘检测和改进Hough变换相结合的方法对纸币倾斜角度进行校正处理。首先,利用Sobel水平算子提取待校正倾斜纸币的边缘。实际应用中,纸币图像边缘存在毛边或噪声等情况,所以纸币图像的边缘只是一个
心。比较流行的图像倾斜度校正方法主要有:基于Fourier变换的方法、基于K一最近邻簇的方法、基于投影的方法和基于Hough变换的方法等。但是上述方法计算速度慢,不能满足纸币清分机对图像的实时性处理要求。本文研究了一种Sobel算子边缘检测和改进Hough变换相结合的方法对纸币倾斜角度进行校正处理。首先,利用Sobel水平算子提取待校正倾斜纸币的边缘。实际应用中,纸币图像边缘存在毛边或噪声等情况,所以纸币图像的边缘只是一个 较不清晰的直线轮廓,为了能较准确地找到图像边缘,采用Hough变换检测图像中的直线。Hough变换是一种从图像中识别或提取某种特定几何形状的算法,利用不同参数空间下点与线的对偶性,将原来图像所在空间的某特定曲线利用曲线表达式转换为对应参数空间里某一点,从而可以实现将曲线的寻找检测问题转变成为在参数空间中对峰值点的寻找问题。Hough变换的最大优点是抗干扰性强,可以克服纸币边缘存在的噪声影响,但缺点是计算速度慢。研究针对Hough变换计算速度慢的缺点,对Hough变换进行了改进,提高了计算速度。
较不清晰的直线轮廓,为了能较准确地找到图像边缘,采用Hough变换检测图像中的直线。Hough变换是一种从图像中识别或提取某种特定几何形状的算法,利用不同参数空间下点与线的对偶性,将原来图像所在空间的某特定曲线利用曲线表达式转换为对应参数空间里某一点,从而可以实现将曲线的寻找检测问题转变成为在参数空间中对峰值点的寻找问题。Hough变换的最大优点是抗干扰性强,可以克服纸币边缘存在的噪声影响,但缺点是计算速度慢。研究针对Hough变换计算速度慢的缺点,对Hough变换进行了改进,提高了计算速度。
图像边缘检测常用的边缘检测方法大都是基于方向导数的算法,这些算法主要有 基于一阶微分算子的Robert边缘检测算子和Sobel边缘检测算子及基于二阶微分算子的拉普拉斯边缘检测算子。考虑到Sobel边缘检测算子具有更强的抗噪声干扰能力和较快的计算速度,本文采用Sobel算子对纸币边缘检测。图1为Sobel水平方向和垂直方向算子;图2为采集到待边缘检测的纸币图像;图3为Sobel水平方向算子检测到的纸币边缘;图4为Sobel垂直方向算子检测到的纸币边缘。从检测结果可以看出,水平算子边缘检测所得直线比较长且除纸币边缘无其它噪声,因此以纸币水平方向的边缘为对象来计算纸币的倾斜角度。
基于一阶微分算子的Robert边缘检测算子和Sobel边缘检测算子及基于二阶微分算子的拉普拉斯边缘检测算子。考虑到Sobel边缘检测算子具有更强的抗噪声干扰能力和较快的计算速度,本文采用Sobel算子对纸币边缘检测。图1为Sobel水平方向和垂直方向算子;图2为采集到待边缘检测的纸币图像;图3为Sobel水平方向算子检测到的纸币边缘;图4为Sobel垂直方向算子检测到的纸币边缘。从检测结果可以看出,水平算子边缘检测所得直线比较长且除纸币边缘无其它噪声,因此以纸币水平方向的边缘为对象来计算纸币的倾斜角度。
倾斜角度计算Hough变换运用两种坐标之间的变换来检测图像中的直线或其它有规律变化的曲线。由于RMB图形是一个标准的矩形图,本文利用Hough变换检测纸币图像上的水平边缘或者竖直边缘。Hough的最大特点是抗干扰能力强,且这条直线上的点数越多,这种抗干扰能力就越好。图3所得到的水平边缘明显比图4得到的垂直边缘长,因此选择在图4的水平边缘上应用Hough变换来计算直线。Hough变换的原理:设原图像x-y空间中,直线的方程为y=ux+v,将其转换成极坐标ρ-θ空间中对应的极坐标方程为ρ=xcosθ+ysinθ
式中:ρ为直线到原点的距离,θ表示直线法线与z轴的夹角。通过Hough变换,x-y空域内的任一条直线可以用ρ-θ空间里的一个点(ρi,θi)来表示;同样x-y空域内的任意一点(x,y)也可以用ρ-θ空间里的一条正弦曲线表示,也就是所谓的点线对偶。Hough变换虽然抗干扰能力强,但由于遍历的范围广,导致了计算速度慢。为了令Hough变换适应图像运算的高速要求,设定了角度计算时的范围和步长,即θ=-S0:S0i:S0。这样,计算速度就受到了范围土S0和步长S0i的限制。范围越大,计算时间越长;步长越小,计算时间越长。可以通过实验,确定合适的范围和步长。
Hough变换的算法实现步骤为:
(1)定义一个ρ-θ空间(并定义一个计数器i_hough(ρ,θ))所有元素初始化为零;
(2)对待校正的图像二值化,区分出目标图和背景图;
(3)遍历图像所有像素点,并对每点进行判断,若是目标点,则令角度θi以步长S0i从-S0遍历到S0,将所有角度依次代入上述方程,并对ρ-θ空间对应的位置元素加1计数(对计数器i—hough(ρ,θ)加l计数);
(4)当完成对所有像素目标点判断后,检测ρ-θ空间的所有点,并寻找峰值点,峰值点对应着x-y空间的一条直线。
研究结论通过采用Sobel算子和Hough变换相结合的方法计算纸币的倾斜角度,进而完成对纸币倾斜角度的校正,对提出的算法在DM642核心处理芯片上进行了实现。实验证明,此校正方法不仅具有较强的抗干扰性、较快的计算速度,而且还具有较好的校正效果。1
室内GPS发射器角度校准装置的研制开展室内GPS的角度校准研究对室内GPS综合测量误差的评定及室内GPS的推广应用具有重要基础意义。研究结合室内GPS的测角原理研制了一套室内GPS发射器角度校准装置,解决了室内GPS发射器水平角和俯仰角的校准问题。
室内GPS的测角原理室内GPS测角原理如图5所示。该系统可以简单描述为发射器、接收器及 计算机等部件的合成。其核心是发射器,每个发射器发射出两束扇形光束,当发射器旋转时,这两束光将扫掠整个测量空间。每个发射器的旋转速度都是单一的,它使得接收器能够跟踪某发射器并与其它发射器的信号隔离。每个发射器开始转动时,还发射第3路光信号,该宽面选通脉冲信号作为接收器的时间信号,它绕发射器整个3600圆周发射。发射器的测量空间由扇面光和选通脉冲光来决定,扇形光束决定了垂直测量范围、选通脉冲光决定了水平测量范围。接收器通过测量两个脉冲及最后一个脉冲间隔与选通脉冲之间的时问间隔将时间信息转换为角度信息,这样接收器就可确定每个传感器到发射器的水平角和垂直角。
计算机等部件的合成。其核心是发射器,每个发射器发射出两束扇形光束,当发射器旋转时,这两束光将扫掠整个测量空间。每个发射器的旋转速度都是单一的,它使得接收器能够跟踪某发射器并与其它发射器的信号隔离。每个发射器开始转动时,还发射第3路光信号,该宽面选通脉冲信号作为接收器的时间信号,它绕发射器整个3600圆周发射。发射器的测量空间由扇面光和选通脉冲光来决定,扇形光束决定了垂直测量范围、选通脉冲光决定了水平测量范围。接收器通过测量两个脉冲及最后一个脉冲间隔与选通脉冲之间的时问间隔将时间信息转换为角度信息,这样接收器就可确定每个传感器到发射器的水平角和垂直角。
由于室内GPS测量得到的是水平角和垂直角的信息,所以由两台或两台以上室内GPS发射器可以组成原理与经纬仪测量系统类似的坐标测量系统,从而可测得接收器的空间位置。因为测量点空间坐标测量不确定度来源于室内GPS的测角的不确定度,因此要评定整个系统的精度就要首先确定单个室内GPS发射头的测角精度。
系统设计(1)技术要求
根据室内GPS的测量原理,其水平角和垂直角的测量不确定度是不一样的,设定测量范围为≤10m,则室内GPS发射器标定的指标为:水平角的测量不确定度为3.0”,垂直角的测量不确定度为2.4”。
根据校准的需要,要求室内GPS角度校准装置的测量不确定度:水平角测量不确定度UH=1.6”(k=2);俯仰角测量不确定度Up=1.0”(k=2)。
(2)整体方案
室内GPS发射器水平角和俯仰角的校准问题是采用精密转台与竖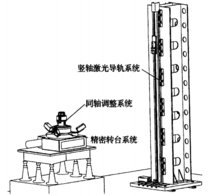 轴激光导轨生成多目标的方法相结合的方案来解决的。根据角度校准的技术要求,角度校准装置主要由精密转台系统、同轴调整系统、竖轴激光导轨系统组成。校准装置的布置如图6所示,转台中心距导轨运动轴线1.7m,竖轴激光导轨的有效行程为2m,以保证满足±30°俯仰角校准的需要。其中精密转台能够直接对发射器的水平角进行标定,而俯仰角则需利用三角形的边长给出,竖轴激光导轨系统能够在竖直方向生成并精确测得多个目标定位点的距离,发射器中心到竖直激光导轨的垂直距离可以测得,则其俯仰角便可以此求出。同轴调整系统能够实现发射器的旋转轴与转台旋转轴问的快速同轴调整。
轴激光导轨生成多目标的方法相结合的方案来解决的。根据角度校准的技术要求,角度校准装置主要由精密转台系统、同轴调整系统、竖轴激光导轨系统组成。校准装置的布置如图6所示,转台中心距导轨运动轴线1.7m,竖轴激光导轨的有效行程为2m,以保证满足±30°俯仰角校准的需要。其中精密转台能够直接对发射器的水平角进行标定,而俯仰角则需利用三角形的边长给出,竖轴激光导轨系统能够在竖直方向生成并精确测得多个目标定位点的距离,发射器中心到竖直激光导轨的垂直距离可以测得,则其俯仰角便可以此求出。同轴调整系统能够实现发射器的旋转轴与转台旋转轴问的快速同轴调整。
(3)同轴调整系统
水平角及俯仰角的校准需要先将室内GPS调整到与转台同轴的位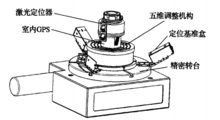 置上,传统方法是利用千分表的方法进行调整,该方法不仅效率低,而且需要借助外部工装将将发射器的轴心线引出。该同轴调整系统基于一维PSD实现同轴调整,它包括4部分:一是由3个定位基准盒组成的同轴调整基准,二是安装有两个激光器的高精度旋转定位轴系,三是五维调整机构,四是安装在被测件旋转轴上的激光定位器。同轴调整工作方式如图7所示。同轴调整过程如下:同轴调整时激光定位器安装到室内GPS的旋转头上,并锁紧,再将安装有激光定位器的室内GPS安装在五维调整机构上。当室内GPS旋转头旋转时,两个激光定位器会扫出以室内GPS旋转头为轴线的两个锥面,此时由于室内GPS旋转轴与转台转轴不重合,激光不会同时打在6个PSD的零位上,通过调整五维调整机构,使得6个PSD数据输出基本为零,即能保证室内GPS转轴与转台转轴重合,调整完成后取下激光定位器,便可开展室内GPS的角度校准工作。经实验测得其同心调整精度为0.004mm。
置上,传统方法是利用千分表的方法进行调整,该方法不仅效率低,而且需要借助外部工装将将发射器的轴心线引出。该同轴调整系统基于一维PSD实现同轴调整,它包括4部分:一是由3个定位基准盒组成的同轴调整基准,二是安装有两个激光器的高精度旋转定位轴系,三是五维调整机构,四是安装在被测件旋转轴上的激光定位器。同轴调整工作方式如图7所示。同轴调整过程如下:同轴调整时激光定位器安装到室内GPS的旋转头上,并锁紧,再将安装有激光定位器的室内GPS安装在五维调整机构上。当室内GPS旋转头旋转时,两个激光定位器会扫出以室内GPS旋转头为轴线的两个锥面,此时由于室内GPS旋转轴与转台转轴不重合,激光不会同时打在6个PSD的零位上,通过调整五维调整机构,使得6个PSD数据输出基本为零,即能保证室内GPS转轴与转台转轴重合,调整完成后取下激光定位器,便可开展室内GPS的角度校准工作。经实验测得其同心调整精度为0.004mm。
(4)竖轴激光导轨系统
竖轴激光导轨系统能够在竖直方向上的目标点位精确距离测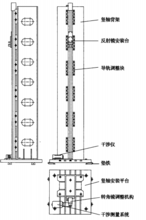 量,主要目的是为解室内GPS俯仰角的精确校准问题而设计。该系统主要由干涉仪、导轨背架、铸铁安装平台、导轨、减速器、驱动电机、导轨调整机构、反射镜安装台、垫铁及驱动控制系统构成,具体结构如图8所示。系统利用滚珠丝杠导轨将单一传感器运动到多个定位点位置,采用激光干涉仪作为竖直导轨测长的基准,实现多点高精度测量,避免了传感器进行逐点测量时引入的目标定位误差对测角精度的影响。采用多点测量时传感器与目标点采用销孔配合,其定位误差在0.01mm左右,发射器距离目标点距离为1.7m,经推算由此引入的测角误差在1.2”左右,而竖轴激光导轨系统在竖直方向上的测量精度可达到0.005mm,由此引入的测角误差为0.6”,因此竖轴激光导轨的引入提高了俯仰角的校准精度。2
量,主要目的是为解室内GPS俯仰角的精确校准问题而设计。该系统主要由干涉仪、导轨背架、铸铁安装平台、导轨、减速器、驱动电机、导轨调整机构、反射镜安装台、垫铁及驱动控制系统构成,具体结构如图8所示。系统利用滚珠丝杠导轨将单一传感器运动到多个定位点位置,采用激光干涉仪作为竖直导轨测长的基准,实现多点高精度测量,避免了传感器进行逐点测量时引入的目标定位误差对测角精度的影响。采用多点测量时传感器与目标点采用销孔配合,其定位误差在0.01mm左右,发射器距离目标点距离为1.7m,经推算由此引入的测角误差在1.2”左右,而竖轴激光导轨系统在竖直方向上的测量精度可达到0.005mm,由此引入的测角误差为0.6”,因此竖轴激光导轨的引入提高了俯仰角的校准精度。2
本词条内容贡献者为:
尹维龙 - 副教授 - 哈尔滨工业大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号