

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
采煤机运行参数和运行姿态的自动控制系统。目的是提高采煤机对恶劣工况的适应能力,减少故障,提高开机率,进而实现全工作面自动化的无人工作面采煤。采煤机自动化包括恒功率自动调速系统、自动调高系统、 工况监视系统和故障诊断等主要内容。采煤机自动化是现代正在发展中的技术,有待进一步完善和提高。1
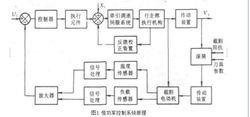
恒功率自动调速系统依据作用在截割滚筒上的 外界负载自动调节牵引速度,使截割电动机(主电动机)的实际平均功率始终保持在额定值附近,以获得机 器能力最大发挥的系统。它包括负载环节在内的闭环 控制系统。从截割(主)电动机测取负载信号与额定值 比较后,经控制器调节牵引速度,牵引速度的变化使截 割滚筒上的负载相应变化,把负载功率限制在额定值 的95%至105%之间。系统还具有人为限定最高牵引 速度的功能,操作人员可根据采煤工艺和配套设备工 序衔接的要求,预先调定最高牵引速度。下页图1所示为恒功率自动调速系统原理。
自动调高系统按顶板和底板起伏变化规律自动调节滚筒工作高度,使滚筒保持沿顶底板截割的系统。 采煤工作面的工作环境是煤尘多、能见度低、噪声大、 操作人员很难准确判断滚筒的截割状态,经常会发生连续截割顶底板岩石而造成损坏截齿或导致其他机件故障,也可能因产生火花而引起工作面爆炸。过厚的顶煤和底煤,会使采高降低,推移输送机和支架困难,回采率下降。自动调高技术是实现操作人员离开工作面 的关键技术,由于煤层厚度及顶底板的岩性和赋存条 件复杂多变,工作环境恶劣,虽然世界各国都在探索各种技术途径,但大多处于试验阶段。
采煤机滚筒自动调高由煤岩分界识别和调高电液伺服系统构成。煤岩分界识别方法主要有自然γ射线探测、截割力制导和记忆数字程序控制三种。这三种滚筒自动调高系统都通过采煤机机载计算机实现。
自然γ射线探测利用自然γ射线探测煤岩分界的滚筒自动调高系统。装备这种系统的采煤机割煤时要求在顶底板上留150~200mm的煤皮。顶底板沿牵 引方向或推进方向发生起伏变化时,煤皮厚度也将随之变化。赋存于顶底板中自然γ射线的衰减量与煤皮厚度成正比。安装在采煤机上的γ射线探测器所接受的自然γ射线的剂量直接反映煤皮厚度,即煤岩分界的位置。自然γ射线自动调高系统只适用于顶底板岩层含有较强的γ射线,及一次采全高的采煤工作面。
截割力制导利用滚筒截割力分析作为煤岩分界 识别原理的滚筒自动调高系统。被截割煤体由若干不 同物理性质 (特别是截割阻抗) 的煤分层和矸石层组 成。在有限的范围内,各煤分层和矸石层的物理性质, 在沿层面方向是近似均匀的。各分层作用在滚筒测量 截齿上的截割阻力各不相同。采煤机工作时测量截齿 上的截割力信号直接反映滚筒在煤层中的截割位置。
记忆数字程序控制在采煤机工作的第一个循环中,采用较慢的牵引速度,由人工操作调高系统,使滚筒沿煤岩分界线截割。同时采集沿工作面各坐标点xi上对应的滚筒工作高度坐标zi,构成煤岩分界坐标数组{xi,zj},存入计算机系统,作为滚筒调高的参考值。第二个工作循环开始,采用正常牵引速度,由计算机对调高系统进行数字程序控制,重复上一刀记忆的 煤岩分界。当顶底板起伏发生变化时,需由操作人员重新设置煤岩分界坐标数组。记忆 数字程序控制滚筒自动调高,是一种比较容易实现的方法,但只能减轻操作人员的劳动强度,而不能完全实现自动化。
工况监视系统又称运行状 态监视系统。在线检测主要运行参数和运行姿态,使机器各系统 不偏离正常功能的系统。当出现 故障偏离正常功能时,控制系统调整某些运行参数,恢复正常功能,或发出报警信号,由人工停止运行,排除故障。采煤机工况监视用机载计算机实现,由传感器及相应的变换器、数据采 集及传输装置、数据处理、显示器、报警装置及键盘组 成。传感器多数为模拟量信号,部分为数字量和开关量信号,传感器及其变换器均设计成本安电路。由模数 (A/D)变换器、数模(D/A)变换器和I/O接口组成的信号输入输出系统,用于数据采集和变换、输出控制 和报警信号。操作输入系统是人与机器进行联系,监视运行状态及设定运行参数极限值的设备,包括通讯接口、LCD液晶显示器、操作键盘(一般为16键)及外 存贮器。采煤机机载计算机具有良好的抗干扰和抗震 性能,能适应采煤工作面工作环境。
采煤机工况监视系统的主要功能: ①监视系统故障自检。采煤机每次重新启动后,自动检查传感器信 号、各通讯接口、显示报警装置及控制系统的工作状 态,以及计算机系统的工作模式是否正常。②检查并显示采煤机主要运行参数(供电电压、控制电压、各液压系统压力、滚筒高度等)的实际值。只有当这些参数正常时,采煤机才进入工作状态。③采煤机运行过程中在 线检测各监视参数。在显示器上巡回显示参数的实际值和设定的上、下极限值。当发生参数超限时,同时在 所有显示屏幕上显示超限参数及其实际值,并发出报 警信号,计算机发出控制指令,或改变运行参数,或停 止采煤机运行,待故障排除后,采煤机方可重新起动。 ④16键键盘具有人机对话、输入自检指令、选择显示方式和设置监视参数极限值等功能。
故障诊断通过分析工况监视所获得的信息,确 定采煤机故障的部位、性质、程度、类别、原因、故障 的发展趋势和影响,以便作出控制和维修决策。目的是 防患于未然,提高采煤机可靠性和开机率。采煤机故障 诊断是一项发展中的技术,有待进一步完善提高。
采煤机故障诊断过程的基本环节包 括:①运行参数在线检测。动态过程的振动、力、转矩、 功率、位移、温度等都可用作监视和诊断信号。在线检 测反映故障症状最敏感的物理量作为该参数的特征信 号[xj]。②特征信号分析。所采集的运行参数特征信 号经滤波、平滑、确定边界等预处理后,进行归纳分析。 诸如幅域分析、频域分析、统计分析、时间序列分析等。 ③特征量选择。选择在类间边界附近对工况状态相关 性强、反映灵敏的特征量构成模式向量[x]。并力求 压缩[x] 的空间维数。④状态识别。根据特征参数, 参照某种规范,利用各种知识和经验,对设备的状态予 以识别、诊断,建立判别函数D[x]和规定判别准则。 ⑤故障分类及决策。按判别函数实时地对工况状态进 行分类。运行正常时,计算机发出指令,采煤机继续运 行。如果故障形成,计算机实时进行故障分析,显示分 析结果和维修决策,或发出报警信号,或发出停机指 示。2
本词条内容贡献者为:
杨刚 - 教授 - 西南大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号