

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
高斯一牛顿迭代法(Gauss-Newton iteration method)是非线性回归模型中求回归参数进行最小二乘的一种迭代方法,该法使用泰勒级数展开式去近似地代替非线性回归模型,然后通过多次迭代,多次修正回归系数,使回归系数不断逼近非线性回归模型的最佳回归系数,最后使原模型的残差平方和达到最小。其直观思想是先选取一个参数向量的参数值β,若函数ft(Xt,β)在β0附近有连续二阶偏导数,则在β0的邻域内可近似地将ft(Xt,β)看作是线性,因而可近似地用线性最小二乘法求解1。
基本思想高斯-牛顿迭代法的基本思想是,使用泰勒级数展开式去近似地代替非线性回归模型,然后通过多次迭代,多次修正回归系数,使回归系数不断通过通近非线性回归模型的最佳回归系数,最后使原模型的残差平方和达到最小2。
一般步骤高斯-牛顿法的一般步骤如下所示2。
(1) 初始值的选择。其方法有三种:
一是根据以往的经验选定初始值;
二是用分段法求出初始值;
三是对于可线性化的非线性回归模型,通过线性变换,然后施行最小平方法求出初始值2。
(2)泰勒级数展开式。设非线性回归模型为
 其中: r为待估计回归系数,误差项
其中: r为待估计回归系数,误差项 。
。
设 为待估回归系数
为待估回归系数 的初始值,将式(1)
的初始值,将式(1) 在g0点附近作泰勒展开,并略去非线性回归模型的二阶及二阶以上的偏导数项,得
在g0点附近作泰勒展开,并略去非线性回归模型的二阶及二阶以上的偏导数项,得
 将式(2)代人式(1),则
将式(2)代人式(1),则
 移项,有
移项,有
 令
令
 则
则
 用矩阵形式表示,上式则为
用矩阵形式表示,上式则为
 其中
其中

(3)估计修正因子。用最小平方法对式(3)估计修正
则
 设
设 为第一个迭代值,则
为第一个迭代值,则 。
。
(4)精确度的检验。设残差平方和为
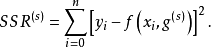 其中,s内重夏迭代次数。对于给定的允许误差率K,当
其中,s内重夏迭代次数。对于给定的允许误差率K,当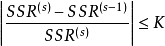 时,否则,对式(4) 作下一次迭代。
时,否则,对式(4) 作下一次迭代。
(5)重夏迭代。重夏式(4),当重夏迭代s次吋,则有
修正因子 ,第(s+1)次迭代值
,第(s+1)次迭代值 。
。
本词条内容贡献者为:
杜强 - 高级工程师 - 中国科学院工程热物理研究所
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号