科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-11-18
内容来源:中国科学院
近年来,旋翼飞行机器人已经从空中观测型发展成为作业型空中飞行系统,其中接触环境时的力控制和移动接触作业是难点问题,中国科学院沈阳自动化研究所研究人员对此展开了研究工作。相关成果已经发表在Robotica、IEEE Transactions on Industrial Electronics 等期刊,并在刚刚结束的智能机器人与系统国际会议上(2019 IEEE/RSJ International Conference on Intelligent Robots and Systems,IROS 2019)上进行了宣读。
为实现接触作业时的力控制,研究所机器人学研究室自主机器人课题组科研人员,首先通过控制策略将飞行机器人变成一个类弹簧系统并进而控制其实现移动接触作业。目前,科研人员已经开发出具有多种功能的作业型飞行机器人系统,能够实现静态接触环境时的末端动态力控制,改型机器人系统可完成按键开关电灯、抓取动态目标、恒力接触滑行等演示。
作业型飞行机器人具有广泛的应用前景,能够帮助人们完成一些附着式作业任务,比如基础设施外墙检修或高空高海拔等人类不可达区域的科考采样等任务。
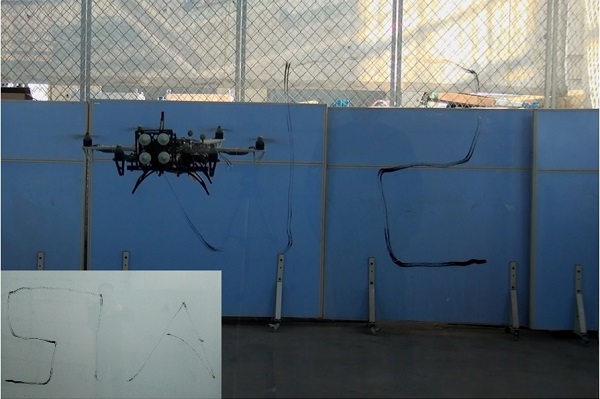
空中“写字”SIA
来源:中国科学院
原文链接:http://www.cas.cn/syky/201911/t20191115_4723996.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
马林看望第十七届青少年机器人竞赛北京队参赛师生




机器人抓取采用声悬浮技术进行无接触操作等
“制造业转型升级”论坛在深圳举行
智能工业机器人发展还需加把力
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况
第九届湖南省青少年机器人竞赛在株洲举行


顺德区数控机械创新应用示范工程及自动化技术交流会召开

科技 | 瑞典四足机器人ANYmal开启极端环境作业测试

【WRC复工复产在行动 • 穿山甲机器人】酒店开启“智能”复工:机器人提供“零接触”服务
【WRC复工复产在行动 • 穿山甲机器人】酒店开启“智能”复工:机器人提供“零接触”服务




科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号