科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-02-09
来源:中国科学院
表面肌电意图识别技术是人机融合智能技术发展的重要支撑技术,在智能假肢、康复机器人等领域具有重要应用价值,然而,该技术在实际应用中常受到电极偏移、个体性差异、肌肉疲劳、肢体姿态或其他综合性干扰等多种因素的影响,难以推广使用,如何克服上述因素的影响是目前急需解决的关键问题。
中国科学院沈阳自动化研究所医疗康复机器人团队在深入分析的基础上,提出了非理想肌电的概念,建立了非理想肌电分析的框架体系,在构建肌电数据集、探索深度学习和迁移学习方法,以及肌电分解技术研究等方面,对未来的关键技术进行了展望,相关文章被《自动化学报》中文版录用。针对电极偏移这一难点问题,科研人员提出了一种自适应矫正方法,可估计出环形传感器偏移的角度,将动作估计精度提高了35.72%,相关研究成果发表在IEEE J. Biomed. Health Inform上。
此外,科研人员融合深度学习的特征提取能力和模型泛化能力,对动作分类、角度估计、力估计、多模态信息融合、个体性差异以及鲁棒性等问题结合深度学习方法进行了系统性总结,分析了目前主要的问题及相应的解决方案,并展望了未来研究方向,相关研究成果发表在IEEE/CAA J. Autom. Sinica上。
与人共融是机器人技术发展的重要特征,将人的智能与机器人的智能相融合推动了与人共融机器人的发展。长期以来,课题组致力于人机融合智能领域的理论研究和应用实践,是国内最早利用表面肌电进行人体连续运动意图估计的团队之一,首次提出基于运动单元分解的运动意图识别方法,开发了手部康复系统、踝关节康复系统、上/下肢外骨骼康复机器人等系统并结合患者开展临床试验,相关研究成果先后发表在IEEE Trans. Ind. Electron, IEEE Trans. Neural Syst. Rehabil. Eng上。
来源:中国科学院
原文链接:http://www.cas.cn/syky/202102/t20210205_4777237.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
“制造业转型升级”论坛在深圳举行

外肌肉机器人研究获进展
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况
马林看望第十七届青少年机器人竞赛北京队参赛师生




哈工大机器人研究所赵杰:服务机器人10年后超过工业机器人
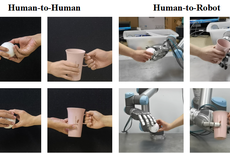
智能机器人系统研究团队提出机器人类人灵巧操作方法,实现人与机器人间的类人物体交接
顺德区数控机械创新应用示范工程及自动化技术交流会召开
机器人辅助直肠癌手术加速患者康复
论坛通知 |2020中国康复机器人分论坛

科技 | 神奇软体机器人:哈佛可穿戴式软体康复机器人问世


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号