科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-02-24
来源:两江科技评论
人类获取的信息80%以上来自视觉,成像系统作为核心技术已经在科学观测、智慧城市和公共安全等方面取得了长足的发展。针对动态大场景多对象(十亿像素成像)兼顾“看得全”和“看得清”的迫切需求,面临宽视场与高分辨不可兼得的固有矛盾。科学家们瞄准这一难题历经了探索与攻关,取得了系列突破。
第一代单像感器成像系统(以Gigapan为代表),通过扫描拼接成十亿像素图像;第二代结构化阵列像感器成像系统(以杜克大学AWARE为代表),沿用均匀采样原理,采用同构像感器阵列,硬件结构固化,标定过程依赖相邻像感器重叠的视场区域,标定算法复杂度高。进一步提高系统的鲁棒性和可扩展性代价大。
针对宽视场与高分辨的固有矛盾,清华大学方璐团队另辟蹊径,率先提出了非结构化计算成像新原理,成功研制了阵列像感器十亿像素智能成像系统(UnsctructuredCam)。
非结构化计算成像新原理的特征是“层内非结构”和“层间主从式异构”:(1)“层内非结构” 摒弃了现有结构化阵列的均匀化采样、信号同分布假设,突破了相邻像感器间结构固化和视场重叠的制约,赋予像感器阵列场景内容自适应成像的能力;(2)“层间异构”提出了主从式硬件子系统分治机制和多尺度场景内容关联机制,突破了现有结构化阵列像感器尺度单一和难以扩展的瓶颈,赋予阵列像感器成像系统高鲁棒、易标定、可扩展特性。实现了十亿像素级全景360度动态三维成像,提出了高分辨参考的跨尺度深度超分辨算法,全局像感器感知低分辨全景深度,局部像感器感知高分辨细节,实现了动态大场景百米级深度感知与重建。

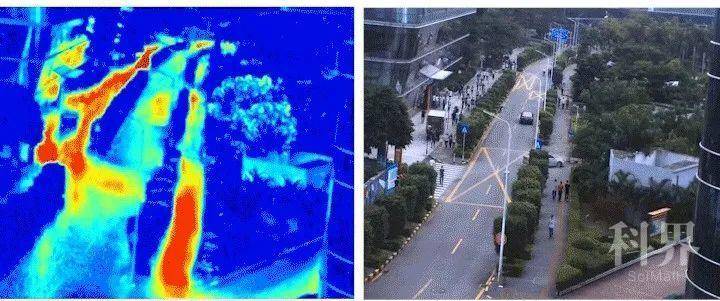
图1 阵列像感器十亿像素智能成像系统(UnsctructuredCam)
视频1:UnstructuredCam具有高鲁棒和易标定特性

图2 UnstructuredCam具有视场和感知维度可扩展特性
视频2:十亿像素级全景三维成像
课题组应用UnsctructuredCam构建了国际首个十亿像素级大场景多对象视频数据平台PANDA (gigaPixel-level humAN-centric viDeo dAtaset),对象标注框达3000人/单帧,对象尺度变化超500倍,对象遮挡比例达50.9%。PANDA突破了人眼视觉分辨率的极限,填补了大场景下高密度人群数据平台的空白,为探索视觉智能新方向提供了不可或缺的数据基础。
视频3:十亿像素智能成像
研制的非结构化阵列像感器十亿像素智能成像系统可应用于边海防、智慧城市、公共安全、无人系统、虚拟现实等领域。
文章信息:
该研究成果以"A modular hierarchical array camera"为题在线发表在Light: Science & Applications。
本文通讯作者为方璐副教授,第一作者为清华大学博士后袁肖赟和季梦奇。该项目得到了国家自然科学基金的支持。
来源:imeta-center 两江科技评论
原文链接:http://mp.weixin.qq.com/s?__biz=MzU0NDgwMjI0MQ==&mid=2247496170&idx=2&sn=98511873d466a7e5851f2cae705c1697
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
CT血管成像

化石记录揭示最早节肢动物“光感保护器”
红外成像制导
北航顶刊:实现无剪切应力的局部大变形!
北航陈玉丽团队《先进材料》:受刺猬背刺启发的力学超材料设计新策略

武汉大学眭海刚教授等:多时相遥感影像变化检测方法综述

【CSIG云讲堂】7月14日19点,许永超教授主讲:像素点关系在图像处理与计算机视觉中的应用

宿主感测器AhR能致力于抗感染的群体感应侦测

学术 | Landsat卫星计划、科学及应用现状
凝视成像


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号