

科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-11-28
来源:材料科学前沿
【背景及成果简介】
生物混合机器人是通过人工和生物部件的集成而发展起来的,正在成为理解和综合生物系统中驱动结构、功能和行为过程的平台。此外,生物混合系统能够在更简单和受控的体外环境中了解自然生物的基本设计原理,有助于开发人造仿生机器人。虽然现在已经采用了肌肉细胞或组织构造来进行驱动运动型机器人游泳和行走,但是目前所有的生物混合机器人都缺乏控制肌肉活动的神经元。由于不管多种复杂的动物行为都依赖于神经系统,需通过感知和协调的运动模式来使身体与环境对接。因此,必须将生物混合系统扩展到感觉运动领域,且需通过运动神经元控制肌肉活动驱动生物混合机器人运动。
基于此,伊利诺伊大学厄巴纳香槟分校的Mattia Gazzola和M. Taher A. Saif(共同通讯作者)联合报道了由神经肌肉单元驱动的生物混合机器人游泳。首先作者建立了一个设计框架,并着重强调成功开发神经肌肉生物驱动器及实现其运动所需要考虑的要求和原则。利用了一种结合实验和预测性计算模型的方法以实现设想中的生物混合系统。首先在独立的软支架上开发神经元肌肉共培养的测试平台,并验证神经肌肉单元的功能。接着,使用计算模型来设计低雷诺数运动的鞭毛游泳者体系结构。同时,该模型考虑了执行器响应、顺应性人体力学和流体动力学。最后按照计算蓝图,获得一种能够无张力向前运动且神经肌肉单元驱动的生物混合型游泳机器人。研究成果以题为“Neuromuscular actuation of biohybrid motile bots”发布在期刊PNAS上
【图文解析】
首先,作者设计了生物混合系统驱动的运动框架。如图1所示,该游泳机器人由一个软支架组成,在该支架上肌肉和神经元被嵌入重构的细胞外基质(ECM)中以发育功能性神经肌肉单元。关于支架材料和几何形状,细胞来源和组织培养技术的选择分别基于两个主要原则:引导自组织和原位发育,用于形成肌肉组织构造和NMJs。在推进机制方面,选择使用细长的鞭毛,因为它们在小尺寸的自然游泳者中很常见,即雷诺数低(Re<<1)。
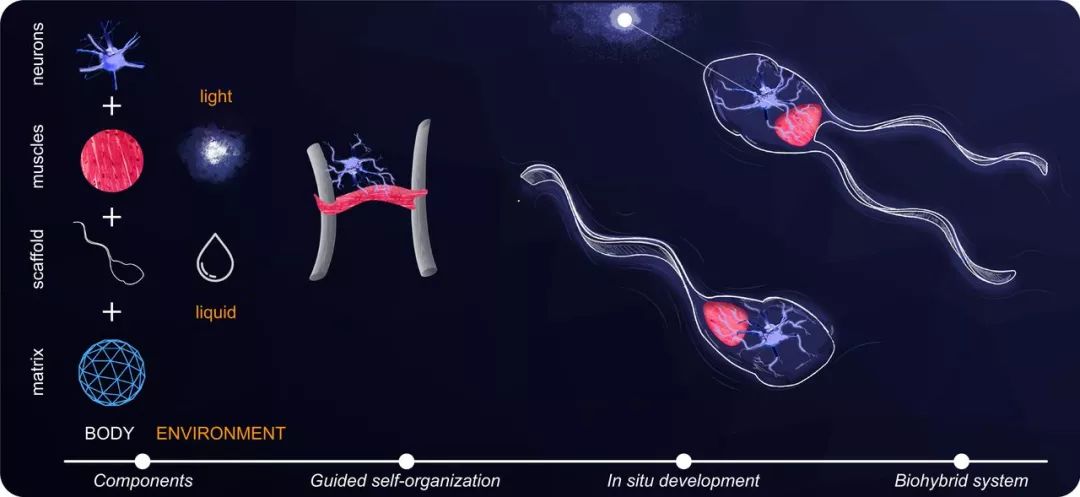
图一、概念框架
接着,作者考查了自由支架的原位神经肌肉发育。设计了一个开发和表征独立式PDMS支架上的神经肌肉单元的测试平台。支架由具有中/空腔以促进神经元传播的结构(图2A)。负载成肌细胞的凝胶在培养前2天会被压实,从而导致形成桥接的肌肉条(图2B)。在单独的培养中,通过使用产生包含运动神经元的神经球而建立的方案,对光遗传学小鼠胚胎干细胞进行定向分化获得光激发的运动神经元(图2C)。用ECM覆盖具有肌肉条的支架以启动神经元肌肉共培养,然后将神经球植入中空腔中(图2D)。神经突的生长明显偏向于肌肉条,极少的神经突向其他方向生长(图2E)。偶尔出现的自发抽搐表明NMJ是特异性靶向的(图2F)。
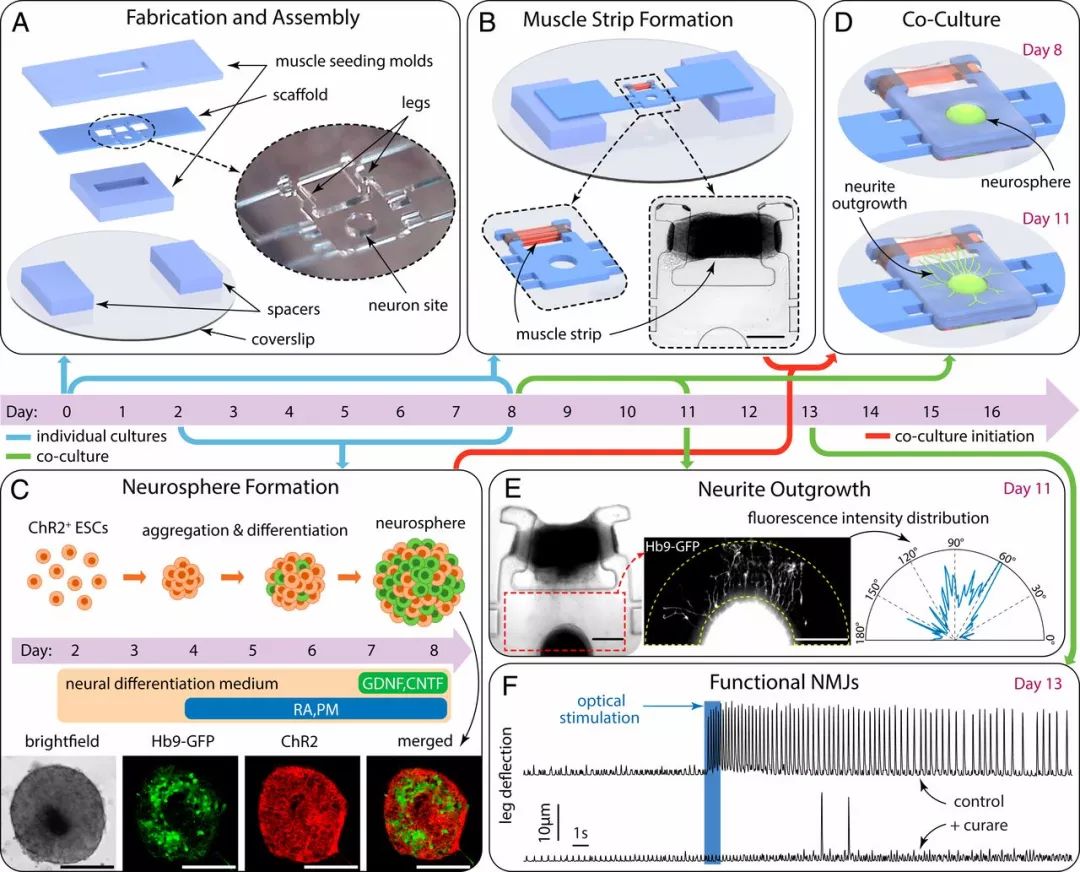
图二、生物制造时间轴线
接着,作者设计并模拟计算了机器人游泳,且由上述神经肌肉致动器驱动的机器人游泳。为了概括这些力,将虚拟肌肉驱动与测试支架的虚拟结合(图3A)。在实验测试平台中,神经元的周期性光学刺激所引起的肌肉静止张力和循环收缩力的特征在于腿部变形(图3B)。同时,作者对机器人游泳者的蓝图进行数字化设计(图3C)。此外,仿真结果表明对于中等尾部长度(图3D),可以达到最佳速度与理论预测一致。作者预测由于人工操作支架,其对称性可能会在实验中发生变化。通过在尾巴张开角(图3E)或尾巴长度(图3F)中计算模拟比较相应的游泳轨迹,发现双尾设计轨迹的偏差较小。
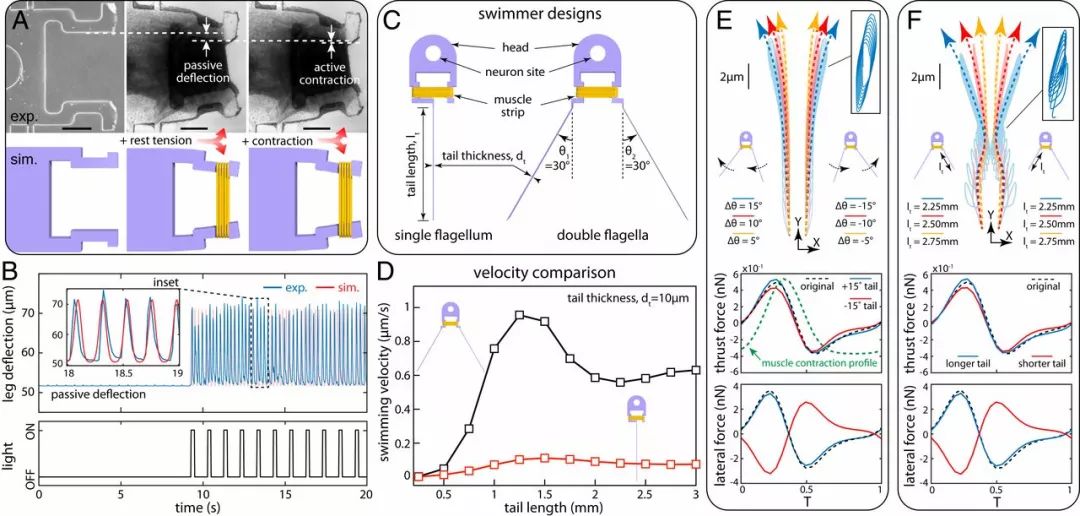
图三、计算建模与设计
最后,作者探究了机器人游泳者的神经肌肉致动。首先,通过光学刺激验证了肌肉的收缩会引起尾巴的偏转。然后,将游泳者释放到培养皿中的培养皿中,并用一层Percoll培养基混合物悬浮(图4A)。以光学方式刺激运动神经元,由此产生的周期性肌肉收缩以时间不可逆的方式推动鞭毛运动,从而推动游泳者前进(图4C)。同时观察到的振荡行为和稳态时间平均游泳速度的测量值都与模拟预测非常吻合(图4D)。因此,低游泳速度不会损害运动设备的神经肌肉致动。此外,测试了长度在0.5-3 mm之间的尾巴,观察到实验记录的速度与模拟计算的趋势非常吻合(图4E)。还评估了游泳轨迹的稳定性(图4F)。发现在所有4种情况下,实验轨迹均与模拟一致,进一步证实了我们建模方法的预测能力(图4F)。
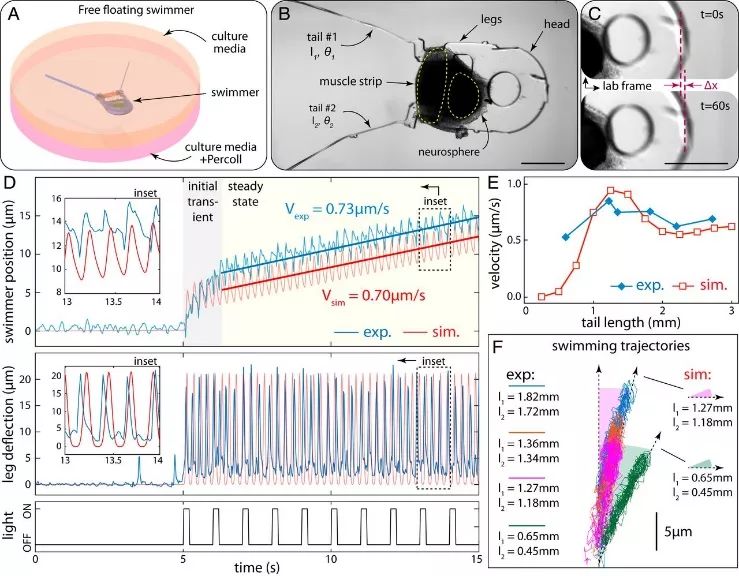
图四、神经肌肉单元驱动的自由游泳
【小结】
综上所述,目前由神经肌肉单位致动的鞭毛机器人的游泳受一般性概念框架的指导。这种生物混合游泳者体现了一种多细胞工程化的生活系统,且是通过自上而下的工程以及自下而上的自组织和发展的综合而开发的。通过运动神经元控制肌肉活动的能力为生物混合系统中神经单位的进一步整合铺平了道路。实验证明培养中的干细胞来源于神经元,可自发地形成具有周期性爆发模式的网络。这些网络可以被利用来设计自主生物混合系统,响应于环境而表现出自适应电动机模式。该研究的生物混合系统可作为解密具体的感官和动作机制的平台,有助于在机器人技术、生物工程和医学领域取得新的成果。
全文链接:
https://www.pnas.org/content/early/2019/09/12/1907051116
来源:材料科学最前沿 材料科学前沿
原文链接:http://mp.weixin.qq.com/s?__biz=MzI1NDc0NTY4OA==&mid=2247484443&idx=4&sn=f1577a2c37719588e8d854f65645a975&chksm=e9c1c92cdeb6403a11296aed5ab1e2b8075636707d3d3e3ef9fbf505fd61d60172ec9c9dfc26&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn


科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号