科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-04-06
据外媒报道,机器人现在经常被用于从货运仓库挑选购买的物品,但大多数机器人仍无法透过墙壁看到东西。也就是说,一个新的机器人基本上能做到这一点,只需要一点外界的帮助。这种被称为RF-Grasp的实验装置由麻省理工学院的Fadel Abid副教授领导的一个团队设计。
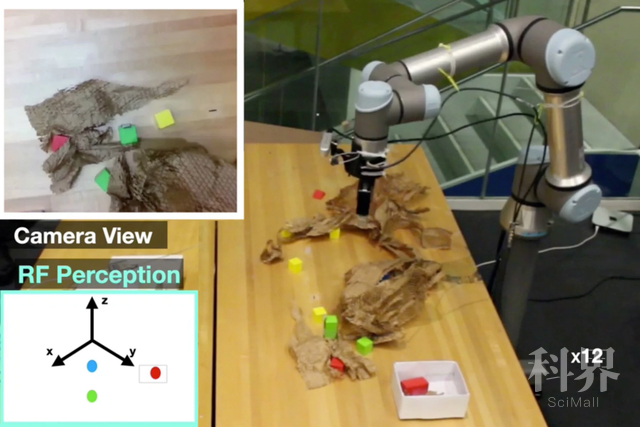
机器人本身配备了一个铰接式抓取臂,手腕上则安装了一个光学摄像头,它可以根据目标物体的外观识别目标物体。然而如果这个物体在墙的另一边的一个箱子里--或被埋在箱子里的其他物品下面--机器人就会看不到从而导致无法找到。
为了解决这个问题,研究人员在机器人操作的区域设置了一个单独的射频收发器。该设备会发出无线电信号,这些信号则会被目标物体上的射频标签反射回来--即使是穿过墙壁。就像其他现有的RFID系统一样,标签以一种独特的方式调制返回信号、传递信息如它的位置和它所附着的东西。
一旦无线电收发器确定了物品的位置,它就会将信息无线传输给RF-Grasp机器人。当到达那个大致的位置,机器人就用它的摄像机从视觉上引导它的手臂然后将杂物移到一边,一直到它发现并抓住想要的物体。
Adib说道:“它首先使用射频来聚焦视觉关注。然后你就可以用视觉来导航。”
(来源:cnBeta)
世界机器人大会自2015年至今已成功举办五届,是推动机器人领域全球产业和技术交流合作的重要平台。大会汇聚了大量创新资源、产业资源、市场资源、资本资源、人才资源,已发展成为机器人领域规模最大、规格最高、国际元素最丰富的顶级盛会,对构建开放包容、互学互鉴的全球机器人生态体系作出了重要贡献。
世界机器人大会
新画卷 新征程
让我们共同追求更卓越的未来
世界机器人大会官方网站:
www.worldrobotconference.com
大会官方公众号:

大会服务平台官方公众号:

来源:gh_729d2362555a 世界机器人大会服务平台
原文链接:http://mp.weixin.qq.com/s?__biz=MzIzMDc5MDU3MQ==&mid=2247499571&idx=3&sn=ffc6457df10260addb4318974439b6a5
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号