科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-05-27
中国人民大学沈栋

1. 委员简介
沈栋,男,中国人民大学数学学院教授、博士生导师,2005年于山东大学数学学院取得学士学位,2010年于中科院数学与系统科学研究院取得博士学位。IEEE Senior Member,中国自动化学会混合智能专业委员会委员,中国自动化学会数据驱动控制、学习与优化专业委员会委员。
主要研究复杂系统的学习控制与优化、分布式人工智能及其在复杂系统控制中的应用。已经在国际期刊和会议上发表或录用了128篇论文,其中SCI论文80余篇,近5年第一作者/通讯作者SCI论文48篇(包括顶级期刊IEEE汇刊13篇,Automatica 2篇)。所发表论文在Web of Science中被引用1000余次,在Google Scholar中被应用1500次,H指数21。近5年出版英文学术专著3部,中文学术专著1部。目前担任SCI期刊International Journal of Robust and Nonlinear Control与IEEE Access的编委会成员,曾获得吴文俊人工智能科技进步奖、IEEE控制系统协会北京分会青年作者奖、IEEE数据驱动控制与学习系统会议最佳论文提名奖等。
2. 委员亮点工作推介
制造业是国民经济的主体,是立国之本、兴国之器、强国之基。工业制造过程多为批次过程,即系统在有限时间内完成生产任务并不断重复。对这类过程,可以通过对已运行批次的信息数据进行深度挖掘,不断优化改善控制信号,从而渐进地提升系统的生产性能。这一需求推动了学习控制的提出与发展。本人的主要工作主要专注于复杂批次过程系统数据驱动学习控制理论与人工智能理论等研究,在被动与主动不完备数据环境、系统运行长度随机变化、乘性噪声环境等多种场景下复杂系统的学习、控制与优化方向取得了一系列进展。
被动与主动不完备数据环境
在实际应用中,所获取的数据往往出现各种各样不完备的情形,包括数据丢包、传输带宽有限等导致的被动型不完备数据和采样、量化等人为采集手段导致的主动型不完备数据。
在被动型不完备数据方面,我们主要研究复杂系统数据传输的问题。在数据丢包方面,已有研究大多是针对量测输出存在丢包的情形设计间歇型更新算法,使用独立同分布的随机变量对数据丢包进行建模并通过取数学期望的办法完成收敛性分析。我们在数据丢包建模、算法设计、收敛性分析技巧等方面给出了全方面的突破,包括提出了有限长度随机序列与沿迭代轴方向的马尔科夫链模型,给出了具有批次依赖性的丢包刻画方式;首次研究了被控系统输出与输入信号在传输中均存在随机丢包的一般情形,发现了被控系统与控制器输入更新过程的异步性具有马尔科夫特性;首次提出了连续型更新算法;给出了几乎必然意义与均方意义下的收敛性分析等。我们还研究了数据丢包、传输乱序、随机延迟、有限存储空间等一系列通信条件相互耦合的复杂情况,创新地提出存储器数据更新机制与学习算法迭代机制解决了相关难点,给出了间歇型与连续型更新算法及其收敛性能的严谨分析。
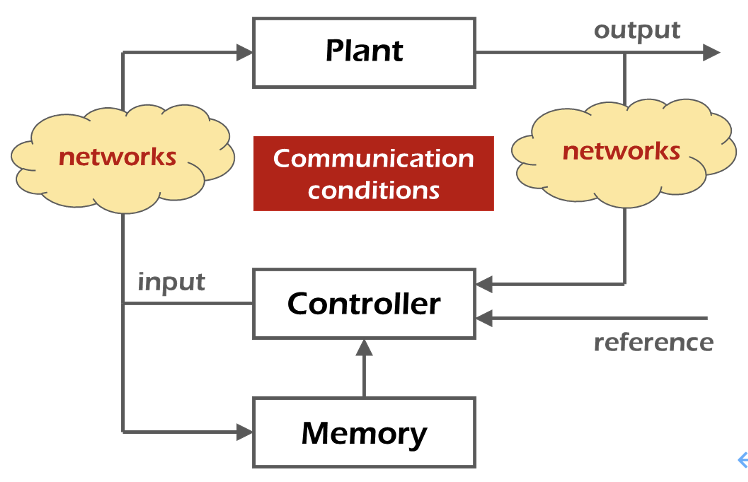
图1. 网络通信环境导致的被动不完备信息
在主动型不完备数据方面,我们针对采样与量化两个方面进行了攻关。在采样学习控制方面,我们首次给出了采样间隔内最大跟踪误差上界的估计,提出了一种实用型变采样学习控制算法,实现了计算负担与跟踪性能的折中平衡。在量化学习控制方面,我们提出了有限量化与编解码机制相结合的设计方法,通过合适的编解码机制为均匀量化器提供了可实现零误差跟踪的设计框架,对均匀量化器的上界计算给出了一个紧凑型公式,为量化器的选择提供了应用参考。
随机变批次长度
对系统动态及跟踪目标进行学习往往要求系统的动态过程满足高度重复性,因此需要系统批次运行长度保持相同,从而保证获得完整的信息用于学习和优化。然而,在实际应用中如康复机器人等智能系统,基于安全性、物理受限等方面考虑,运行过程经常会提前结束并重新开始。我们深入探索了批次长度建模、算法设计、性能分析等问题,在多个维度上克服局限做出了本质性的贡献,形成了系列成果。对离散时间系统模型,创造性地提出了一种基于切换系统轨道计算统计性质的分析方法,首次建立了期望意义、均方意义和几乎必然意义下的收敛性结果。对连续时间参数化与非参数化系统,给出了基于概率分布函数的批次长度刻画模型,对未完成批次过程的部分给出了一种新型误差信号补偿机制,提出了一类新型复合能量函数用于性能分析,可实现前后批次之间复合能量函数的比较,建立了有效的设计与分析框架。
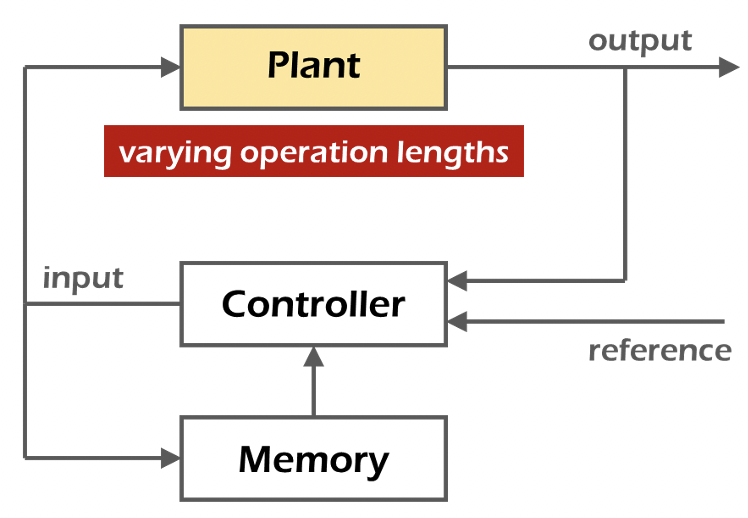
图2. 随机变批次变长度下的学习控制
乘性随机噪声环境
在信息交换过程中,由于衰落信道等常见传播网络的不可靠性,所获取的数据往往会同时受到乘性与加性随机噪声的影响,导致所接收到的信息是有偏的。这类乘性噪声环境给学习控制带来了本质性的困难,需要对实际信号做出必要的校正以实现有效学习。我们首次系统研究了乘性噪声环境下的学习控制问题,在信道统计信息未知情形下创新地提出了仅基于有限测试信号的估计机制及有偏信息的校正机制,基于多种信号平均方法建立了学习速率与跟踪精确度之间的折中平衡关系表达式,基于随机差分方法建立了系统动态信息与信道统计信息均未知情形下的设计与分析框架。
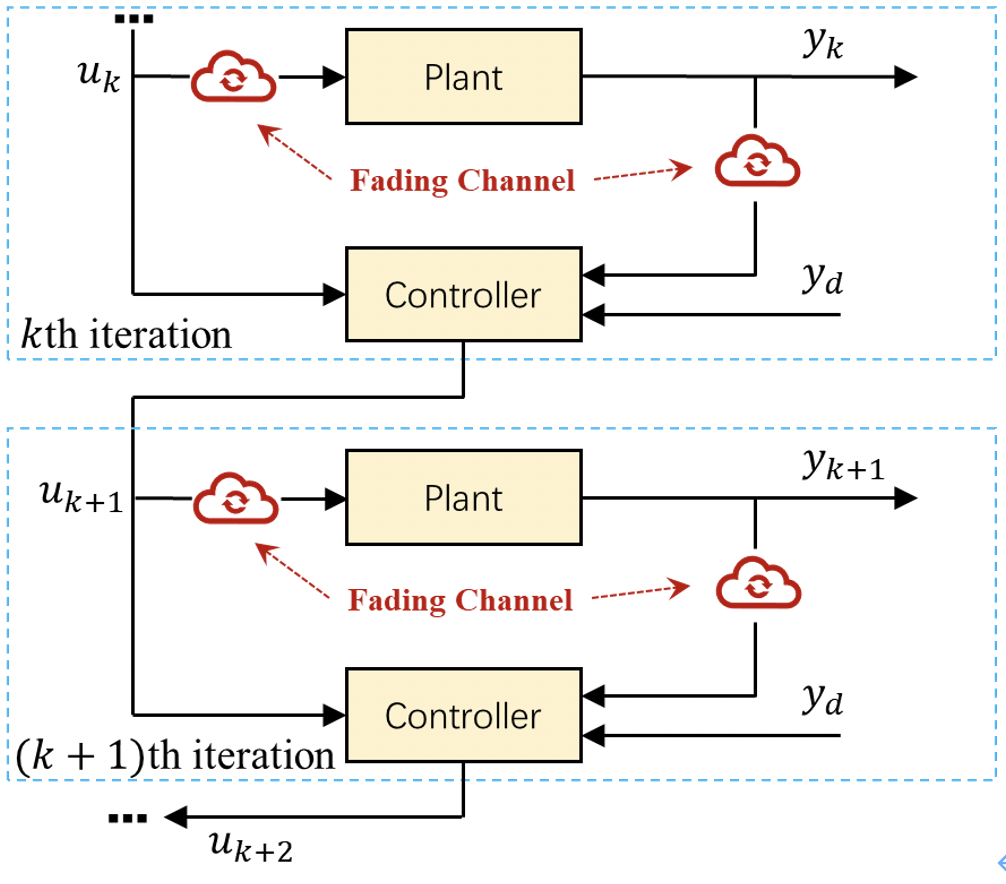
图3. 乘性随机噪声环境下的学习控制
3. 委员寄语
学习是人类的一项基本技能,使得我们能够在重复型任务的完成过程中不断改善。人类的各项动手技能几乎都是通过不断重复来逐渐习得的。基于“学习”这一基本思想也产生不同的研究领域和研究方向。在这其中,我们特别关注学习控制与机器学习。学习控制与机器学习虽然共享了“学习”的指导思想,但两者的原理不尽相同。学习控制针对可重复完成的跟踪任务通过利用已有数据信息对控制信号不断进行校正,来实现对指定目标的渐进精确跟踪,是一种在线调整的控制方法。机器学习是通过对大量数据的挖掘来获得对内在规律的理解,在系统控制中常表现为对复杂非线性函数的逼近,是一种优秀的模态识别方法。我们将致力于提出一种融合两者的智能学习控制方法,针对复杂系统控制与人工智能算法融合中的关键科学与技术问题进行攻关探索,请各位专家多多指点。
来源:HAI-CAA2017 CAA混合智能专委会
原文链接:http://mp.weixin.qq.com/s?__biz=MzI4NjcwODgyOA==&mid=2247485709&idx=1&sn=2c7658615fea632f15244428c8aab5ca
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号