

孙熙宸
加好友
孙熙宸 2019-12-19
来源:知社学术圈
剪纸源于中国先唐民间艺术,一把剪刀,一张纸,裁出令人叹为观止的美妙图案。近年来,剪纸这门古老艺术逐渐开始在科学界绽放光彩。通过简单的拉伸让剪纸“动”起来,来实现二维和三维形变与结构重构,研究人员在薄片上裁剪出了各种功能材料与超材料,展示了在超级可伸缩柔性电子、三维结构自主装、智能窗、以及软体机器人等领域的潜在应用前景。目前,大部分剪纸研究基于类似纸张这种不能感知外部环境变化的非活性材料。如何让剪纸“活”起来,来响应外界刺激,从而实现智能二维和三维可控结构重构,成为一个亟待解决的难题。
近日,北卡州立大学尹杰和宾夕法尼亚大学杨澍团队将折纸与剪纸相结合提出了一种“激活”剪纸二维与三维形变的通用方法。首次提出通过多自由度折叠打开剪纸切割线,来实现平面结构和三维立体结构重构的机理并建立了相关几何与力学控制模型。将传统剪纸与形状记忆聚合物(SMP)纸张层叠形成环境温度响应的 “三明治” 活性剪纸,通过引入表面切痕来自发调控折叠方向与角度,从而实现控制剪纸切割线的打开与多自由度变形模态调节。展示了在自响应可编程二维与三维剪纸超结构、自折叠剪纸仿生机器、以及剪纸软体机器人等方面的潜在应用。
北京时间2019年12月17日,论文以”Programmable active kirigami metasheets with more freedom of actuation”为题发表在《美国国家科学院院刊》(PNAS)上。
折叠打开剪纸切割线设计理念与优势
研究团队通过在剪纸的切线口引入折线来形成一个类似三棱锥的合页。折叠折线自发带动连接的剪纸单元绕合页的面内刚性转动,从而打开切割线实现二维形状变化(图1A-B)。
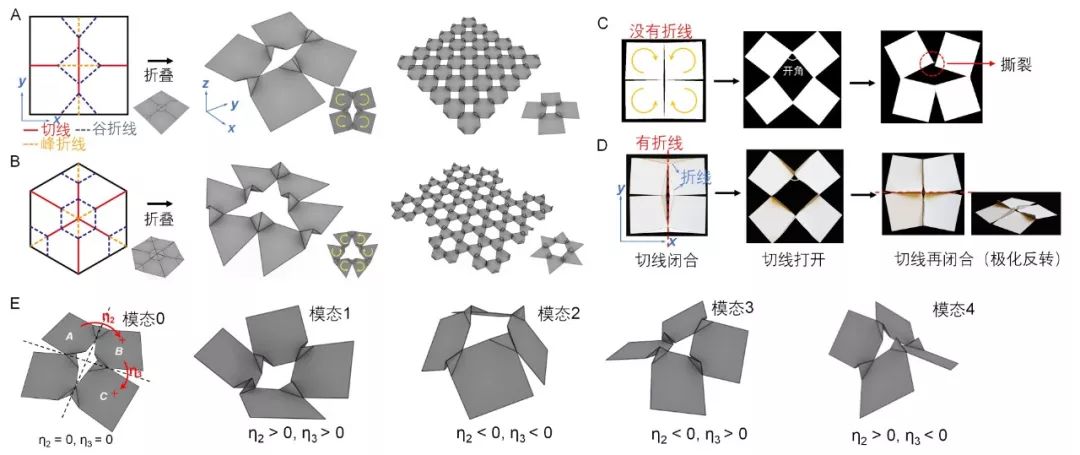
图1:(A-B)引入折线打开切线示意图(C-D)没有折线与有折线对正方形剪纸单元开口角的对比(E)正方形剪纸单元5种二维与三维变形模态示意图
和没有折线的剪纸相比,团队展示了引入折线的三点独特优势:
结构重构的极化反转:通过连续折叠折线,实现无需卸载,切线口从初始的封闭、到打开、直至再次关闭(图1D)。研究团队建立了相应的几何力学模型来量化折线对结构应变以及刚度的影响,以及展示了极化反转在剪纸软体机器人中的潜在应用。
二维与三维结构多自由度可调节性:不同于只有切割线的单自由度的剪纸,通过控制折线折叠角度,可以轻易同时实现单自由度的二维剪纸以及多自由度的三维剪纸结构重构(图1E)。研究团队展示了在可编程二维与三维立体剪纸超结构的潜在应用。
环境响应活性剪纸:无需接触施加机械力来拉伸剪纸变形,折线可以响应周围环境的变化(比如温度,湿度,光照,磁场等外在刺激)实现自折叠,从而实现剪纸结构重构。通过控制折线折叠方向与角度来调节不同的变形模态,研究团队展示了在可编程自折叠剪纸仿生机器人中的潜在应用。
环境响应自驱动活性剪纸二维与三维结构重构
基于自折叠打开切割线的设计理念,研究团队提出了环境响应可编程活性剪纸的概念(图2)。
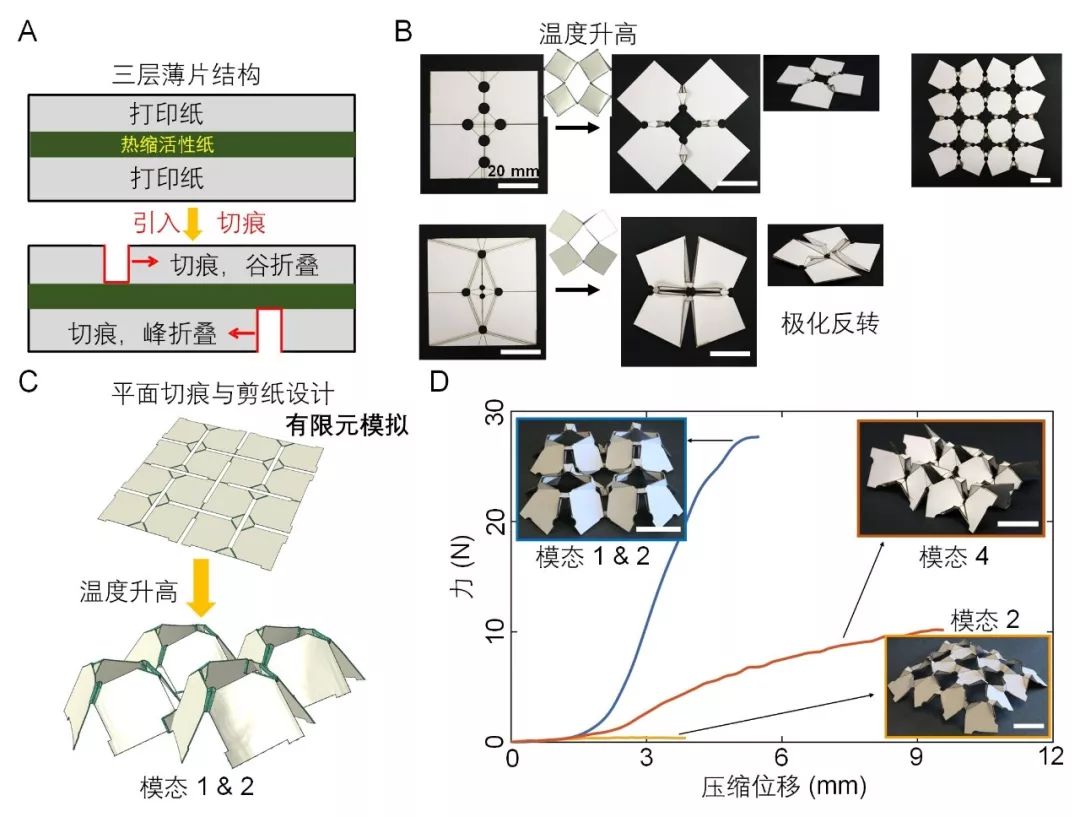
图2:温度响应活性剪纸二维与三维结构重构。(A)三层结构示意图,(B)二维剪纸温度响应的结构重构与极化反转,(C)有限元模拟剪纸的三维重构,(D)同一剪纸图案调节变形模态可以生成不同的三维构型与机械性能
活性剪纸由三层纸张重叠粘合而成,上下两层是普通的打印纸而中间一层是温度响应可收缩的活性纸(图2A)。折叠方向和角度可以相应地由切痕上下层相对位置和切痕宽度来控制。通过控制五种不同的变形模态,研究团队展示了在同一温度响应下,切割线被自发打开甚至极化反转后重新闭合(图2B),同一剪纸图案可以自发生成各种构型与机械性能迥异的二维与三维超结构,比如晶格结构、褶皱结构、以及穹顶结构等(图2C-D)。
应用:可编程剪纸仿生机器以及剪纸软体机器人
利用剪纸的多自由度变形模态以及极化反转的特性,研究团队进一步展示了活性剪纸在温控可编程剪纸仿生机器以及转弯软体机器人等方面的应用(图3)。通过设计表面切痕的排布,在温度响应下, 同一个简单的剪纸单元可以自发的生成多种形态各异的仿生三维构型(图3A-C),比如类似水蜘蛛、爬行软机器人、螃蟹、机械手、以及包装盒的形态。演示了剪纸机器手从“手指头”分开到“关节”弯曲来抓取目标物体的过程 (图3D)。利用极化反转的特性,研究团队以简单的折线剪纸为“身躯”,辅以气动软驱动器为“腿”,演示了爬行软体机器人原地快速转弯的便捷性。
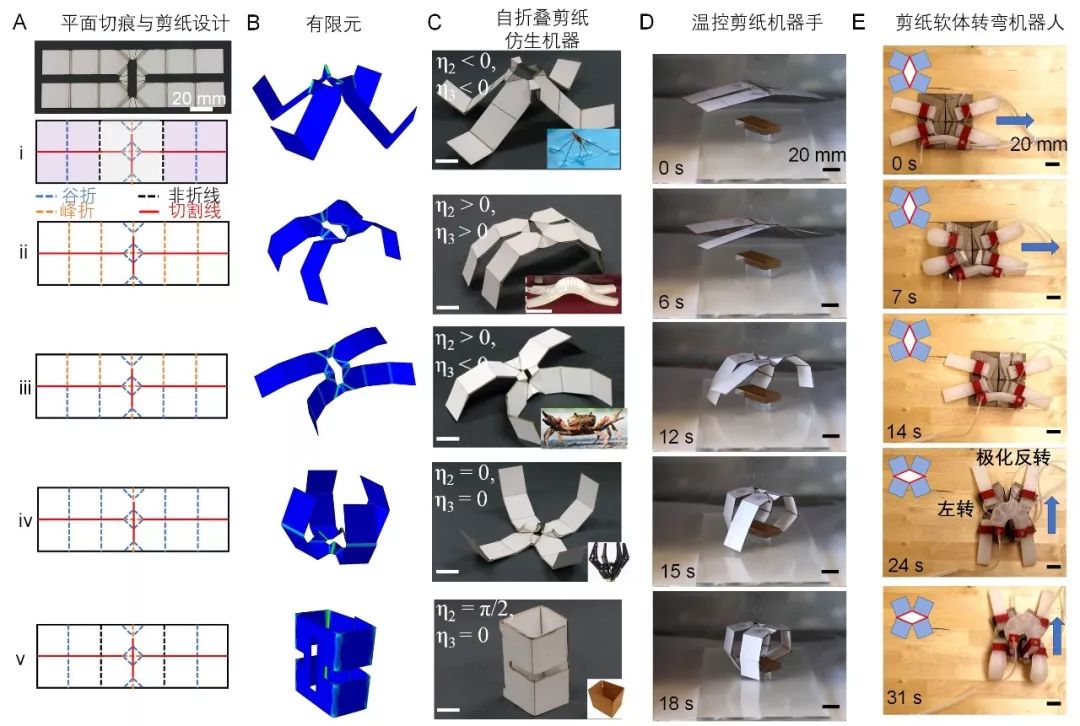
图3:折线剪纸在可编程剪纸仿生机器(A-C)以及剪纸软体机器人(D-E)的应用展示
基于折线的几何与力学约束,研究团队建立了温控响应下多自由度活性剪纸的模态变化的理论控制模型。
展望
该工作中剪纸与折纸相结合的概念理论上可以推广到更小尺度和其他活性材料比如水凝胶,液晶弹性体,形状记忆聚合物,和电解质弹性体等,以及相应的外部刺激比如温度、pH、光、电场以及磁场等。利用剪纸与折纸的独有特性,通过控制可逆变形有望实现无约束可重构剪纸机器人。
团队介绍
该工作由北卡州立大学尹杰团队主导,与宾夕法尼亚大学杨澍教授合作完成。通讯作者为尹杰教授。该工作共同第一作者是尹杰团队的唐一超博士和博士生李艳滨,其它作者有尹杰团队的博士生洪尧烨。尹杰团队(https://jieyin.wordpress.ncsu.edu/)目前致力于机械超材料,软体机器人,以及多功能界面材料的研究。
团队目前正在招收2020年秋季入学的全额奖学金博士生一名,研究方向为活性材料以及软体机器人。欢迎材料、增材制造、机器人、机械工程、力学以及交叉学科等背景的同学申请北卡州立大学机械与航空工程系尹杰团队。有兴趣者可以发送简历到 yingroup2013@gmail.com 。截止申请日期为2020年1月15日。
文章信息
Yichao Tang#, Yanbin Li#, Yaoye Hong, Shu Yang, and Jie Yin*, "Programmable active kirigami metasheets with more freedom of actuation", Proc. Nat. Acad. Sci. USA., (2019) (# denotes equal contribution)
来源:zhishexueshuquan 知社学术圈
原文链接:http://mp.weixin.qq.com/s?__biz=MzIwMjk1OTc2MA==&mid=2247500864&idx=1&sn=b84d80286b70844b0b62b75f5e7ec829&chksm=96d43abfa1a3b3a918c5bff572eb1708787e1058fb4cf8f0e4d072a1eb81358aaac578bf7710&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

二维材料,又发Nature!
二维材料半导体量子晶体管研究取得新进展 实现有效电学调控
最新Nature Mater.、二维材料Nature Mater.
二维室温铁磁/二维有机反铁磁材料研究取得进展
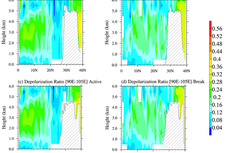
对流层气溶胶三维立体结构研究取得重要进展

未来将属于二维材料时代


宁波材料所在二维纳米防护薄膜材料方面取得进展

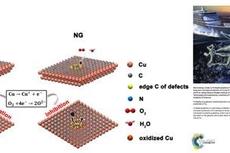
这种二维材料虽易自氧化,但或可作为高效催化剂
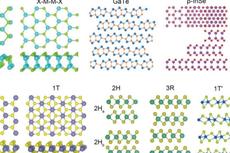
魏钟鸣课题组:综述二维金属硫化物的结构和器件应用
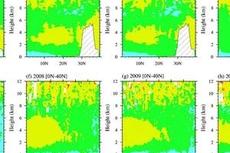
中科院科学家在对流层气溶胶三维立体结构研究中取得进展
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号