科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-07-02
Kalman滤波时间尺度算法是时间产生和保持工作的常用方法,在守时实践中具有重要的实用价值。然而,当钟差数据异常时,会使Kalman滤波时间尺度算法中状态估计出现异常扰动,从而降低时间尺度的准确性和稳定性。因此,应当对原子钟异常数据进行实时处理。 近日,中国科学院国家授时中心时频基准实验室关于原子钟异常数据情况下改进的Kalman滤波时间尺度算法研究取得了新进展。该研究引入等价协方差矩阵和自适应因子,对Kalman滤波时间尺度算法进行改进。研究构造等价协方差矩阵来控制测量异常值对原子钟状态估计的影响,利用统计量实时计算自适应因子的量值来控制状态预测协方差矩阵的增长,以降低原子钟异常对状态估计的影响。 该研究从模拟数据和实测数据两方面原子钟数据异常情况下的Kalman滤波算法进行分析,并与经典Kalman滤波算法进行比较,结果表明当原子钟数据异常发生时,改进的Kalman滤波算法能有效抵制异常数据对时间尺度的影响,可以提高时间尺度的准确度和稳定度。研究还分析了测量噪声为非高斯噪声情况下的算法性能,比较了最小二乘阈值设置用于异常数据处理的情况,结果显示改进的Kalman滤波时间尺度优于最小二乘预处理计算时间尺度的稳定度。
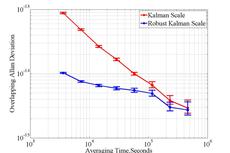
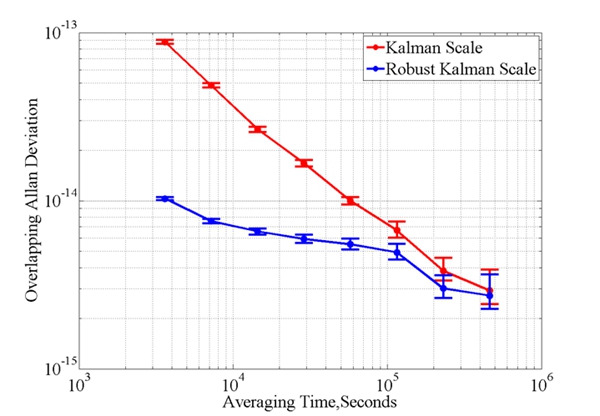 图1.基于两种Kalman滤波算法的时间尺度稳定度比较
图1.基于两种Kalman滤波算法的时间尺度稳定度比较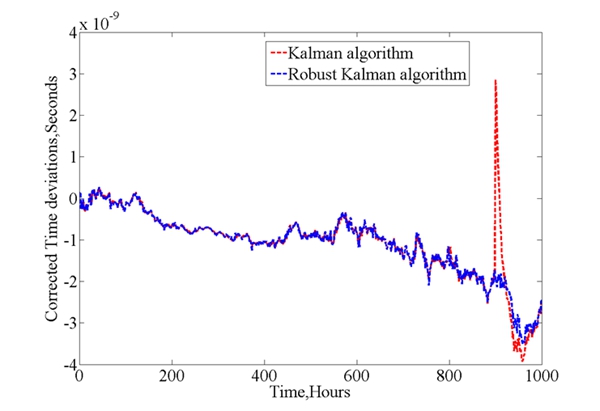 图2.基于两种算法的原子钟改正时间偏差比较
图2.基于两种算法的原子钟改正时间偏差比较来源:中国科学院
原文链接:http://www.cas.cn/syky/202107/t20210702_4796456.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
基于MPC的交直流配电网多时间尺度优化调度

大型强子对撞机首次加速原子:达到接近光速
超高速“电子相机”捕捉处于锥形交叉点的分子

研究揭示月球玻璃地质时间尺度的超凡抗老化效应
月球玻璃地质时间尺度的超凡抗老化效应研究获进展

研究建立兼顾脉冲星时和原子时优势的融合时间尺度
国家授时中心在时间尺度算法研究方面取得新进展
邹屹等-JP&CMP:扩散年代学重塑早前寒武纪变质-构造过程的时间尺度

同济大学揭示俯冲物质深地幔循环过程以及时间尺度和动力学机制

干货 | 美国空军实验室综述:高熵合金的特点及其研究现状


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号