科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-10-11
近日,天津大学封伟教授团队研发了一种具备自主行动能力和触觉应变的4D打印软体机器人,该机器人在一次打印成型后即具有热致无约束滚动能力,无需任何其他后续加工程序。
该研究成果在《细胞》出版社旗下顶尖期刊《物质》发表。
“软体机器人能够适应复杂环境,实现与人类更安全地交互。
” 封伟教授介绍,3D打印可以基于数字模型自动准确地将设计思想转化为复杂零件,为软体机器人制造增加“时间”维度——即4D打印,将智能材料加工成具有对热刺激响应行为的动态结构。
团队在此基础上通过4D打印对液晶弹性体智能材料进行精确加工,直接获得了具有感知能力和适应性的智能软体机器人。
该管状自主软体机器人通过对热的感知,可以自主改变自身形状进而调整运动速度和方向。
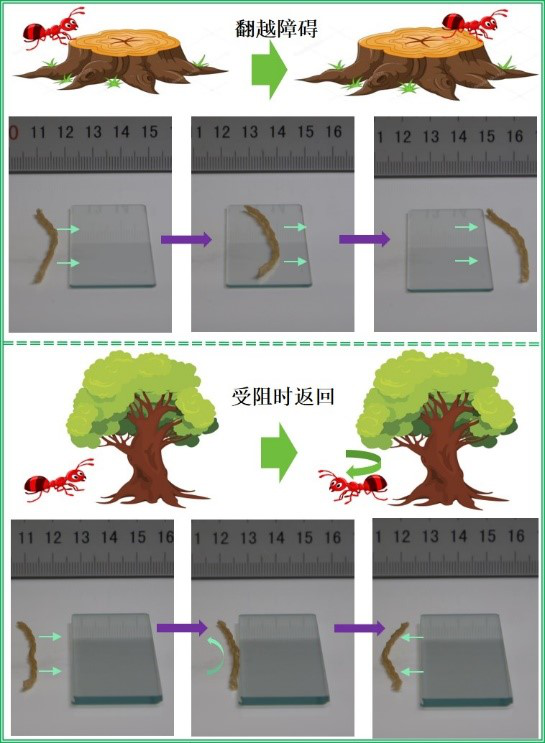
自主控制滚动方向的特性使得这种软体机器人有类似昆虫触角的触觉感知能力,让它能够探测前方道路上的障碍物,根据障碍物的高低实现翻越或折返。
“当样品机器人以一定角度放置在倾斜的加热板上时,样品依然可以向上自主滚动。
” 封伟教授说,“这种自主软体机器人的整个驱动过程是自动的,无需改变环境因素,机器人就能够在脱离人工控制的情况下完成任务。
”据了解,此种自主软体机器人装载货物的最大容量可达机器人重量的40倍。
未来,该机器人在极端高温条件下的货物运输和智能探测等方面具有广阔应用前景。
来源:天津大学
来源:cmesgf 中国机械工程学会
原文链接:http://mp.weixin.qq.com/s?__biz=MzA4MTQxOTQzMw==&mid=2650283527&idx=1&sn=c682eddbf9fb1176c1b4ac740ea26e5b
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号