

科技工作者之家
加好友
科技工作者之家 2021-11-19
近日,中国科学院沈阳自动化研究所在车间智能调度方面取得新进展,基于深度强化学习方法,实现了动态订单下可重构车间对动态生产调度和车间重构的实时优化和智能决策。相关研究成果发表在International Journal of Production Research上。
由于车间调度问题多属于NP难问题,传统元启发式算法只能在多项式时间内求得近优解。对大规模问题,元启发式算法的求解时间难以满足动态生产环境下实时决策的需求。另外,小批量定制化的生产模式,要求车间满足动态可重构。如何对可重构车间的生产调度和车间重构进行实时优化和动态协同是研究难点。
科研人员基于深度强化学习方法,将生产调度和车间重构的决策过程建模为马尔科夫决策过程,建立了调度和重构系统的深度强化学习模型,设计了奖励函数、状态空间和行为空间等。训练后,决策智能体在求解质量和求解时间上取得了比2种元启发式算法(迭代贪婪算法和遗传算法)更优的结果。智能体对单个工件的决策时间仅为1.47 ms,可用于动态生产环境下可重构车间的实时优化和智能决策。
研究工作得到国家自然科学基金和辽宁省自然科学基金项目的支持。
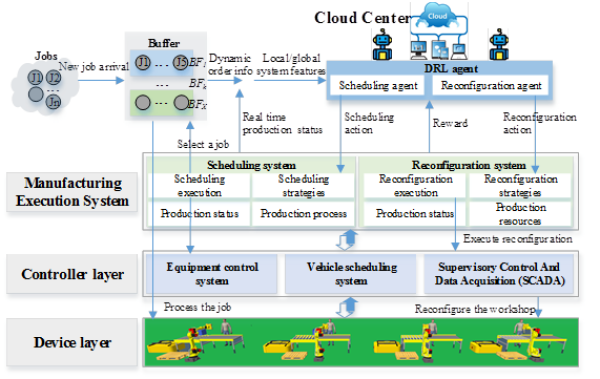
基于深度强化学习的智能调度和重构系统架构
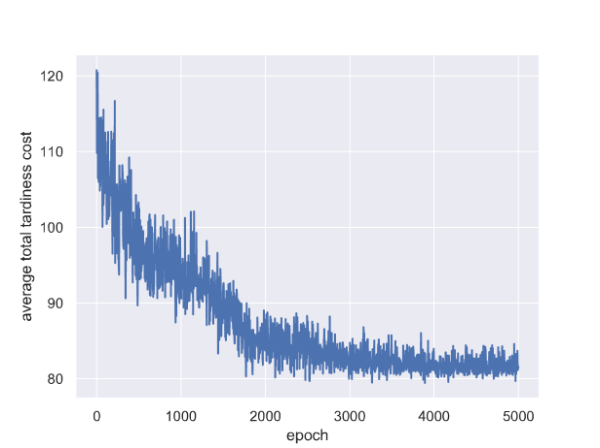
训练过程中目标值的下降曲线
来源:中国科学院
原文链接:http://www.cas.cn/syky/202110/t20211019_4810303.shtml
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

【学会新闻】2018新一代人工智能高峰论坛之分论坛精彩内容
【深度】混合离散教与学算法求解复杂并行机调度问题

【基层动态】选矿厂供矿车间严抓节后安全生产工作
【深度】考虑爬坡约束的油井间抽批调度问题
【深度】高速铁路运行控制与动态调度一体化的现状与展望

【基层动态】敢于担当 勤勉务实--记供矿车间索道维修组
水利部:我国防洪调度已由“经验调度”向“智能调度”转变

聚焦制造智能 回归制造本质—— 中国科协智能制造学会联合体实地调研精雕廊坊和宝沃汽车智能制造实施情况

“5G+智能制造”让钢铁“热”车间“冷”下来
2018年上半年中国智能制造发展现状及趋势
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号