科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-02-20
来源:中国高科技
中国科学院科学家团队——沈阳自动化研究所研究人员近期提出了一种可提升机器人行为智能的新方法,相关成果发表于IEEE Transactions on Cognitive and Developmental Systems。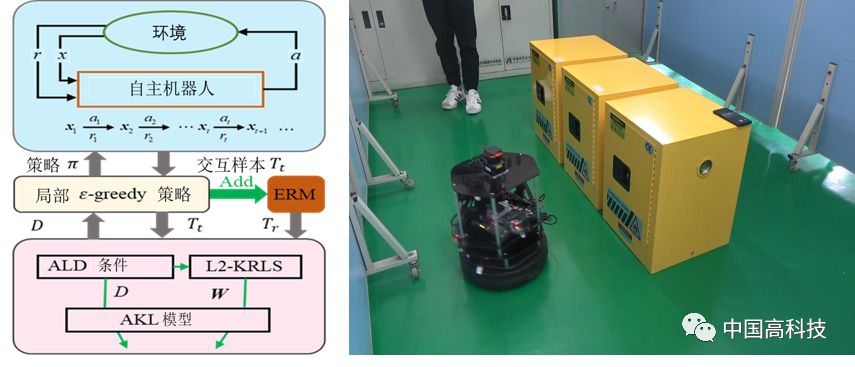
来源:cas-hitech 中国高科技
原文链接:http://mp.weixin.qq.com/s?__biz=MzA3MDczMTAzMA==&mid=2650048530&idx=3&sn=c0571150385eccb943203159d3277090&chksm=87387c6bb04ff57dbd0196a557e1c0fc0360b0486fbcb2c301236f2e9860daaf6fd0b098ac6a&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
顺德区数控机械创新应用示范工程及自动化技术交流会召开

NATURE 人工智能 | 神奇的粒子机器人

机器人与人工智能: 应对全球挑战的终极途径

人工智能重塑机器人产业

残障人士的福音,人工智能助力打造轮椅机器人

聚焦2019世界机器人大会 人工智能重塑机器人产业

NATURE 人工智能 | 神奇的粒子机器人

聚焦2019世界机器人大会 人工智能重塑机器人产业
人工智能+机器人:制造业效率提升新机会
全球人工智能与机器人峰会在深圳召开




科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号