科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-03-03
来源:高分子科学前沿
全部组成部分都是软材料的完全柔性机器人方兴未艾。与以往报道的软硬材料混杂的柔性机器人相比,完全柔性机器人有很多更优异的性能,也克服了其一些缺点,在生物医药、组织工程及航空航天等领域都有着重要的潜在应用。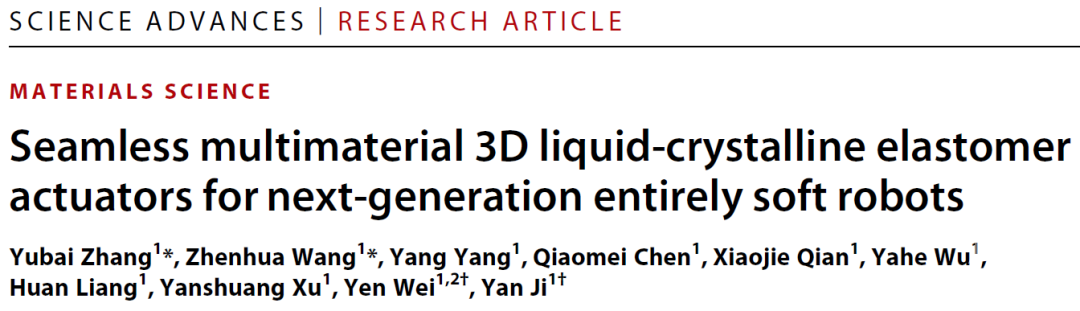 液晶弹性体驱动器的制备过程中最重要的一步是取向形成单畴,往往可以通过机械拉伸、表面锚定效应、外界磁场或偏振光等手段进行取向。由于完全柔性机器人的制备不仅需要对机器人各组件取向还需要将各组件按照预先的设计焊接起来,本文作者采用了同步焊接取向,将制备过程简洁化。经由扫描电子显微镜(SEM)表征,原本明显的重叠界面在焊接后消失不见。所有的完全柔性机器人组件都是首先通过巯基-丙烯酸酯点击聚合形成预聚网络,然后使用AIBN高温热引发过量丙烯酸酯基团完成交联的。
液晶弹性体驱动器的制备过程中最重要的一步是取向形成单畴,往往可以通过机械拉伸、表面锚定效应、外界磁场或偏振光等手段进行取向。由于完全柔性机器人的制备不仅需要对机器人各组件取向还需要将各组件按照预先的设计焊接起来,本文作者采用了同步焊接取向,将制备过程简洁化。经由扫描电子显微镜(SEM)表征,原本明显的重叠界面在焊接后消失不见。所有的完全柔性机器人组件都是首先通过巯基-丙烯酸酯点击聚合形成预聚网络,然后使用AIBN高温热引发过量丙烯酸酯基团完成交联的。 图1. 同步取向交联示意图单个液晶弹性体组件的驱动应变在重复1000次伸缩循环后仍然能达到60%以上。经过特定的加工,单个液晶弹性体组件本身就已经可以具有五种不同的热响应驱动模式,比如螺旋与解螺旋。将具有不同驱动温度的液晶弹性体组件结合,还可以得到从室温至145℃的范围内分步可逆响应的机器人。将其中一段组件表面镀了一层光热响应聚多巴胺材料之后,还可以实现近红外光和热共同分布调控的机器人。此外,作者还发现这种同步焊接取向也适用于具有其他交联网络结构的液晶弹性体材料。只要预聚网络中含有过量丙烯酸酯基团,本文所述的方法就是有效的。
图1. 同步取向交联示意图单个液晶弹性体组件的驱动应变在重复1000次伸缩循环后仍然能达到60%以上。经过特定的加工,单个液晶弹性体组件本身就已经可以具有五种不同的热响应驱动模式,比如螺旋与解螺旋。将具有不同驱动温度的液晶弹性体组件结合,还可以得到从室温至145℃的范围内分步可逆响应的机器人。将其中一段组件表面镀了一层光热响应聚多巴胺材料之后,还可以实现近红外光和热共同分布调控的机器人。此外,作者还发现这种同步焊接取向也适用于具有其他交联网络结构的液晶弹性体材料。只要预聚网络中含有过量丙烯酸酯基团,本文所述的方法就是有效的。作者得到的几种具有不同3D形状和功能的完全柔性机器人列举如下。
机器人1:风扇形状的可逆结构(X16倍速)
机器人2:形似八爪鱼的可逆结构(X16倍速)机器人3:光响应多阶段可逆结构(X8倍速)原文链接:
https://advances.sciencemag.org/content/6/9/eaay8606作者:Pei
来源:Polymer-science 高分子科学前沿
原文链接:http://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651726946&idx=4&sn=110a3e41b413f81ca59ece93808cf8c8&chksm=8b4a3627bc3dbf31ff159fae147d1eb6fe7d3ffe810a38917296dc66324bbd9ffde1c73e6a02&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
机器人造机器人,噱头or风向?

【纵览】一周科技新闻

中国工业机器人密度快速增长 激光焊接机器人工作站助力装备制造提速
顺德区数控机械创新应用示范工程及自动化技术交流会召开
用于下一代全软机器人的无缝多材料三维液晶弹性体驱动器

听机器人教育专委会主任讲机器人

机器人

机器人时代:仿人机器人

2018国内重磅科技新闻盘点
“制造业转型升级”论坛在深圳举行


科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号