科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-06-09
来源:机器之心
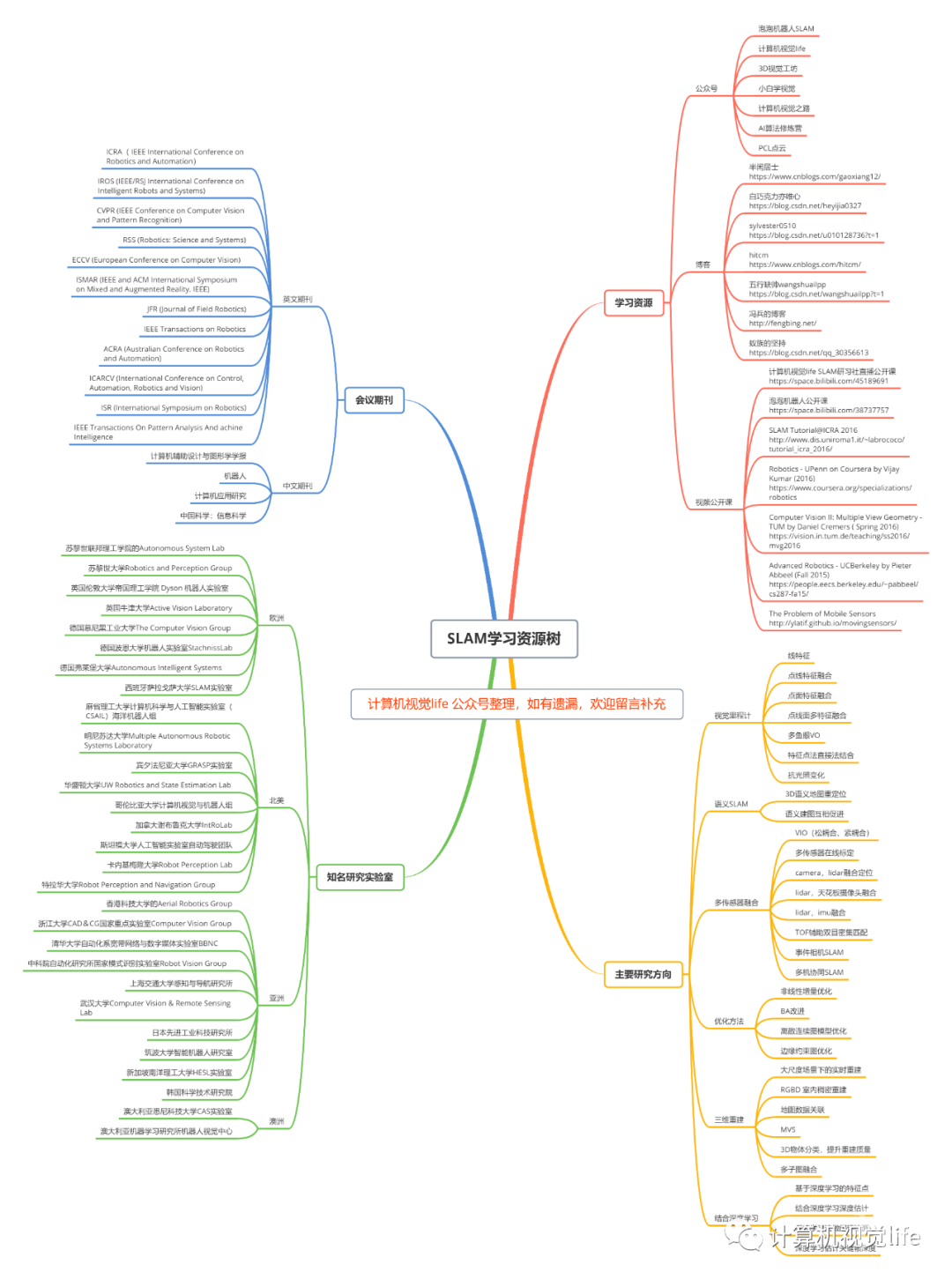
什么是 SLAM? SLAM 技术为核心的三维视觉在学术界也是一个热门方向,从最近几年计算机视觉相关的顶级会议 CVPR, ICCV, ECCV,IROS, ICRA 录用论文来看,视觉定位、三维点云识别分割、单目深度估计、无人驾驶高精度导航、语义 SLAM 等相关论文占比越来越高。
SLAM 技术为核心的三维视觉在学术界也是一个热门方向,从最近几年计算机视觉相关的顶级会议 CVPR, ICCV, ECCV,IROS, ICRA 录用论文来看,视觉定位、三维点云识别分割、单目深度估计、无人驾驶高精度导航、语义 SLAM 等相关论文占比越来越高。 关于 SLAM 的入门介绍及应用案例解析,可以看笔者在一次线下分享中,做的一个入门视频介绍,时长约 55 分钟。
关于 SLAM 的入门介绍及应用案例解析,可以看笔者在一次线下分享中,做的一个入门视频介绍,时长约 55 分钟。

来源:almosthuman2014 机器之心
原文链接:http://mp.weixin.qq.com/s?__biz=MzA3MzI4MjgzMw==&mid=2650789462&idx=5&sn=694b65df580ee54a47bbe72bba9688fe&chksm=871a1228b06d9b3e9ab2bfe26656b7b34156c7576560c54e382d79b62e51692f520d1bc8ae6c&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

学会动态丨中国人工智能学会重磅发布《2018人工智能产业创新评估白皮书》

计算机视觉技术赋能智慧城市

分享丨计算机视觉中的Transformer

用计算机视觉跟踪卫星姿态

未来已来—— 人工智能创新创业分论丨脑在回路的智能系统

用计算机视觉跟踪卫星姿态

人脸识别技术全面总结:从传统方法到深度学习

计算机视觉技术赋能五大行业

【学科发展报告】计算机视觉

解码人脸识别技术:“刷脸”,正走入你我生活


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号