科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-06-12
来源:世界机器人大会服务平台
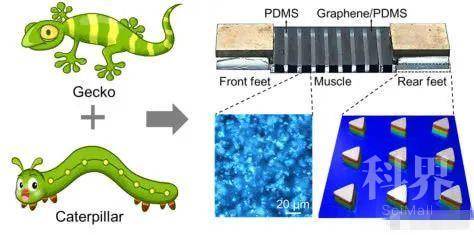
6月12日,科技日报记者从武汉大学获悉,该校工业科学研究院薛龙建教授课题组研制出一种可精准控制方向和速度、综合性能极佳的迷你软体机器人Geca-Robot,预期可在废墟狭缝、生物体内完成各种复杂作业。“我们的研究灵感来源于两种动物,即壁虎和尺蠖。”薛龙建介绍,他的课题组长期致力于仿生材料研究,他们发现,壁虎脚掌上的独特刚毛结构可以使其在各种地形上进行稳定快速的运动,这正好可以解决目前小尺寸软体机器人对运动表面适应性较差的问题。因此,他们尝试向机器人上引入仿壁虎脚趾刚毛的足部,让机器人具有良好表面适应性。由于具有良好的表面适应性和负载能力,而且可以被从紫外到红外全波段的光远程控制,Geca-Robot很适合在狭窄恶劣的环境中作业。例如,可在裂纹和深坑中进行地质勘探,废墟裂缝中进行搜救和目标定位,甚至借助可穿透皮肤的红外光源,在具有复杂表面形貌、酸碱性、温度和湿度的生物器官内或血管中进行药物递送或是病灶检查,应用潜力巨大。
(来源:科技日报)
世界机器人大会自2015年至今已成功举办五届,是推动机器人领域全球产业和技术交流合作的重要平台。大会汇聚了大量创新资源、产业资源、市场资源、资本资源、人才资源,已发展成为机器人领域规模最大、规格最高、国际元素最丰富的顶级盛会,对构建开放包容、互学互鉴的全球机器人生态体系作出了重要贡献。
世界机器人大会
新画卷 新征程
让我们共同追求更卓越的未来
世界机器人大会官方网站:
www.worldrobotconference.com
大会官方公众号:

大会服务平台官方公众号:

来源:gh_729d2362555a 世界机器人大会服务平台
原文链接:http://mp.weixin.qq.com/s?__biz=MzIzMDc5MDU3MQ==&mid=2247486828&idx=2&sn=9aa8d2fcd32847407f2cdda210e8a924&chksm=e8af49a8dfd8c0bee1613a62ff92db35c4e03ca631ed9f035c57d60299d9da64dc75c07b2109&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

机器人

听机器人教育专委会主任讲机器人

机器人合集
第九届湖南省青少年机器人竞赛在株洲举行


机器人理财
“制造业转型升级”论坛在深圳举行

机器人时代:仿人机器人
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况

【征稿】《机器人》“医疗机器人技术”专刊征稿开始啦!!!

【书评】机器人、外星人和狗——《与机器人同行》


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号