科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-06-15
来源:X一MOL资讯
随着各种刺激响应性软物质材料的不断出现,软体智能机器人领域也得到快速发展。诸如温敏性、光敏性、磁控性等智能材料种类及材料多重响应性功能的丰富,使得人们对于仿生有机生命体进行软体机器人复杂运动模式的探索成为可能。由软物质材料构成的软体机器人具有媲美有机体肌肉组织的柔性和韧性,极具应用开发前景。但是,目前软体机器人在自我感知、智能驱动等方面缺乏足够的集成,阻碍了进一步发展。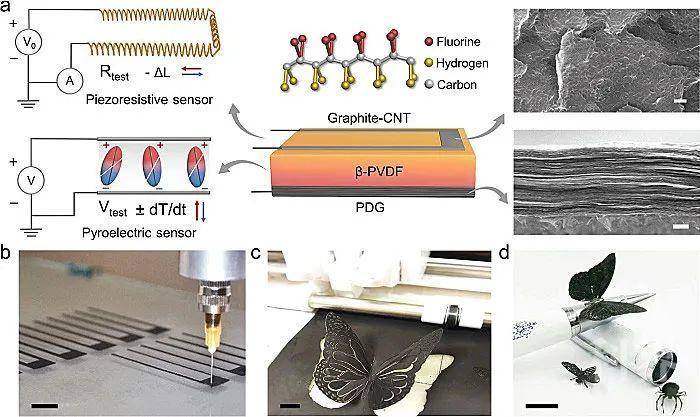

来源:X-molNews X一MOL资讯
原文链接:http://mp.weixin.qq.com/s?__biz=MzAwOTExNzg4Nw==&mid=2657640118&idx=2&sn=d839a79f900fb1002a4cbb58ff80ae2d&chksm=80f87766b78ffe70fff1cf1ae074ea70069d72ada8f3b0e37b8d4276f9f3c4a8f6b5b80e09ae&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

《机器人》在线论坛--软体机器人,马上开播啦!
苏州首届青少年科技节打造“小创客”的科技盛宴
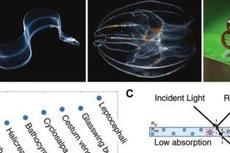
伪装的最高境界——透明软体机器人!

“变色龙”软体机器人问世

科技 | 神奇软体机器人:哈佛可穿戴式软体康复机器人问世

2020“软体机器人”研讨会火热报名中!

仿变色龙软体机器人问世
全新磁驱动高速软体机器人问世

“变色龙”软体机器人问世

全新磁驱动高速软体机器人问世


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号