
科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2018-07-06
网站techxplore.com于7月4日载文称,美国加州大学伯克利分校(UC Berkeley)的研究人员在预印本网站arXiv中上传的论文中公布了一种可以使机器人只需观看一次视频演示即可模仿行为的方法。
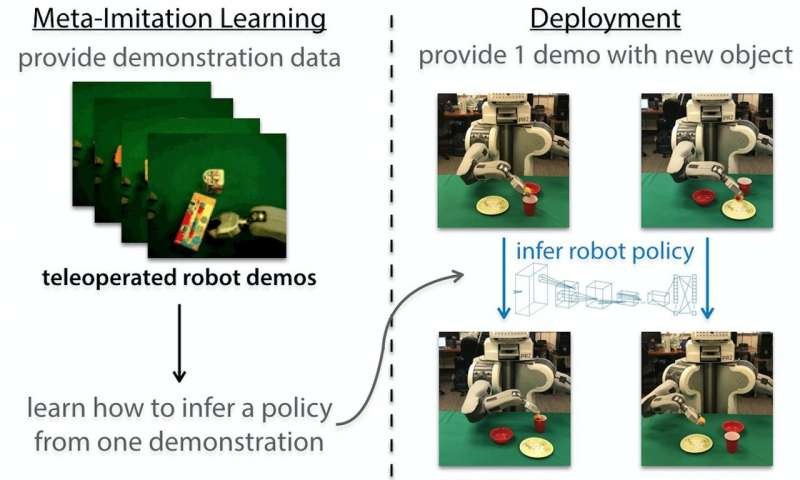
机器人只观察人类一次行动即可学习模仿,意味着能更快速地学习更多新行为。多年来,科学家们一直在努力研究如何实现这一目标。尽管已经可以通过编程使机器人执行一些动作,如拾起物品、组装汽车等——这也是大多数机器人完成动作的方式,但这类编程机器人需要经过多次程序训练才能尽可能避免出现差错。加州大学的研究人员提供的方法可以使机器人像人类和动物那样只通过观察就能学习。更为重要的是,观察次数只需要一次。
为了达到这一目的,研究人员将模拟学习与元学习算法进行了结合,其成果称为模型无关元学习(model-agnostic meta-learning,简称MAML)。研究人员解释说,元学习是机器人通过整合之前经验来学习的过程。例如,机器人观看了人类捡起梨子或者其它的东西并将其放入杯、碗或者其它物品中的视频,它将获得一种客观的“感觉”。如果在每个实例中,机器人都能按一定方式学习、模仿行为,那它将“学会”在观察到类似情景时需要做什么。因此,当机器人看到一个人拾起李子并放入碗中的视频时,它就能识别这种行为,并将其转化为自己的类似行为,进而执行行为。
科界原创
编译:雷鑫宇 审稿:alone 编辑:程建兰
来源:https://techxplore.com/news/2018-07-robot-mimic.html


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号