科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-04-11
来源:材料科学与工程
近日,中国科学院深圳先进技术研究院生物医学与健康工程研究所微创中心在超高可拉伸柔性传感器的研究领域取得新进展,相关论文Microchannel Structural Design For a Room-Temperature Liquid Metal Based Super-stretchable Sensor(基于微通道结构设计的室温液态金属超高可拉伸传感器研究)在Scientific Reports期刊在线发表( DOI: 10.1038/s41598-019-42457-7)。该论文提出了一种微通道的优化设计,提高基于液态金属柔性可拉伸传感器的灵敏度。论文第一作者是深圳先进院客座硕士研究生高钦武,通信作者是王磊研究员和李晖副研究员。
柔性传感器是可穿戴医疗、机器人等领域的研究热点。柔性应变传感器已经成为未来发展智能器件的重点研究方向,其在人机交互系统、电子皮肤、人体运动行为监测系统等领域具有广阔的应用前景。其中,可拉伸性、灵敏度、稳定性、可靠性和舒适性是应变传感器的重要性能指标,如何在实现高可拉伸性的同时大幅度提高灵敏度和可重复性仍然是目前面临的一个挑战。
为此,该课题组成员提出了一种基于微通道的优化设计、利用液态金属制备的柔性可拉伸传感器的方法。研究团队利用有限元仿真优化结果,设计制备柔性可拉伸传感器,实验结果表明该柔性传感器可在590%的拉伸,270o扭转和180o弯曲的情况正常工作。当拉伸550%,灵敏度GF可达4.95,拉伸重复率误差<0.1%,为实现人体手指、手腕等关节等运动精准测量提供了可行性方法,充分展示了其在柔性可穿戴电子设备领域的良好应用价值。
该研究得到了国家自然科学基金-深圳机器人联合基金重点支持“穿戴式精确定位介入手术机器人的力觉感知与导丝操控机理(U1713219)”等项目的资助。(来源:深圳先进技术研究院)
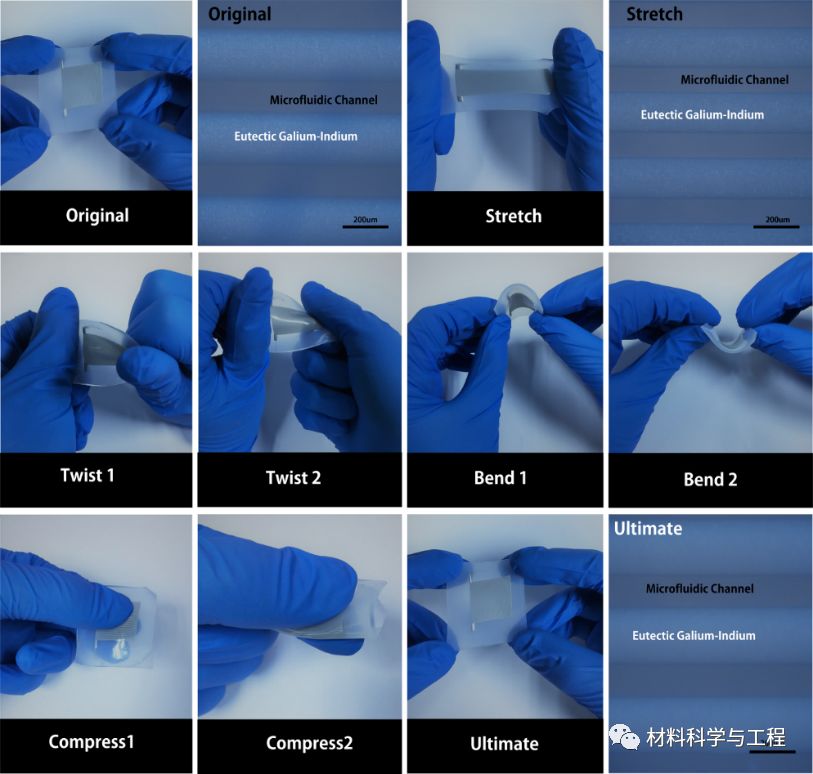
柔性传感器的拉伸、扭转和弯曲
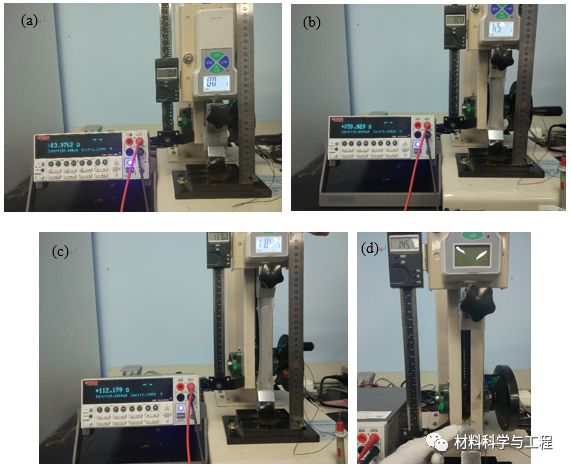
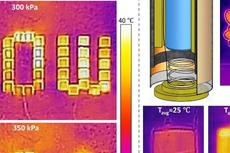
超高可拉伸传感器的拉伸实验
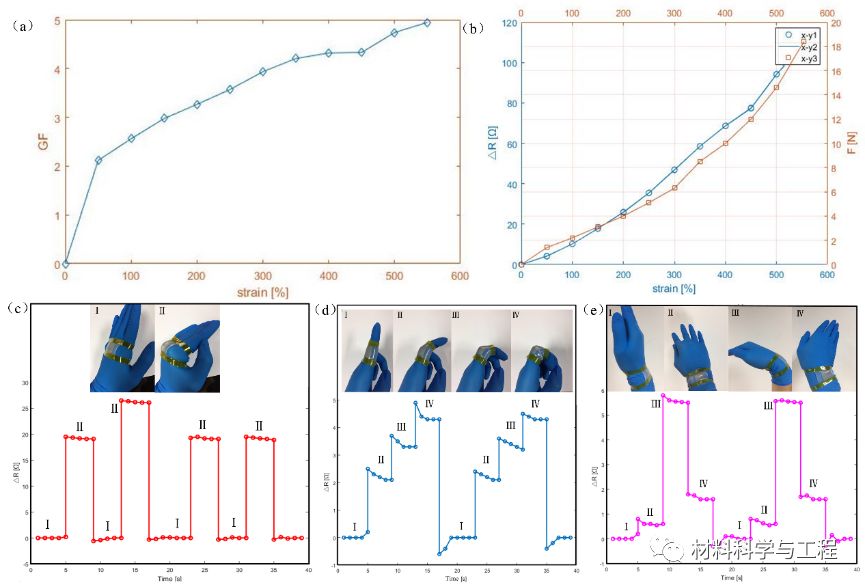
可拉伸传感器的特性分析和应用示范
来源:mse_material 材料科学与工程
原文链接:http://mp.weixin.qq.com/s?__biz=MzA4NDk3ODEwNQ==&mid=2698820023&idx=4&sn=66918255291fc162c0180145b74bffa5&chksm=baf6e9618d81607716052945ae21526f19ebca31918bfca1f4bb4981700413a7ca76a5d0bcba&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
液态金属 柔性电子 拉伸 传感器技术 机器人传感器 拉伸运动
中科院理化所饶伟、刘静综述:柔性可变形微纳米液态金属材料
我学者研发出液态金属驱动机器人
《Nature》子刊:具有反常压阻效应的液态金属柔性导电复合材料

仿人类皮肤传感器,让机器人轻松穿针引线夹鸡蛋

科技 | 边缘上的AI:“协作机器人”如何快速处理传感器数据

液态金属复合材料:可实现超大尺度膨胀变形

一种制造软机器人传感器的可持续策略

【IIRE专家观点】孙富春:机器人视触传感器与主动感知技术将带动产业发展

让柔性机器人触觉更灵敏,基于颜色的传感器可模拟皮肤多重感知

人工肌肉和新型传感器如何让机器人由硬变软?


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号