科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-10-06
来源:X一MOL资讯
透明是自然界中动物常使用的一种非常有效伪装方法。柳叶鳗、栉水母、玻璃翼蝴蝶等动物都采用透明的策略在环境中伪装和保护自己。尽管在自然界中利用透明的方式实现伪装司空见惯,但在传统机械系统、设备和机器人中却难以实现。其中一个重要原因是由于电动机等传统的驱动器难以做成透明的,此外用于开发机器人本身的材料也是不透明的。相比较而言,近年来发展起来的软体机器人有望可以实现传统机器人难以获得的许多仿生功能,开发利用先进材料和智能驱动方式的可伪装透明机器人成为该领域的研究热点。
近日,新加坡国立大学(NUS)材料科学与工程系欧阳建勇教授团队、机械工程系朱建教授团队和新加坡科技研究局高性能计算研究所合作研发出基于透明可拉伸导电高分子电极材料的透明介电弹性体驱动器,并以此作为人造肌肉开发了一种可伪装透明软体机器人。该软体机器人是由透明介电弹性体驱动器(DEAs)驱动,以经过特殊形状设计的透明聚对苯二甲酸乙二醇酯(PET)基板作为机器人的主体,因此开发的软机器人具有极高的透明度,从而可模仿自然界生物利用透明的策略来实现伪装。此外,该软体机器人可在电刺激下迅速从三维(3D)结构转化为二维(2D)结构,整个机器人甚至可以完全变平,进一步减小漫反射,增强其伪装功能。
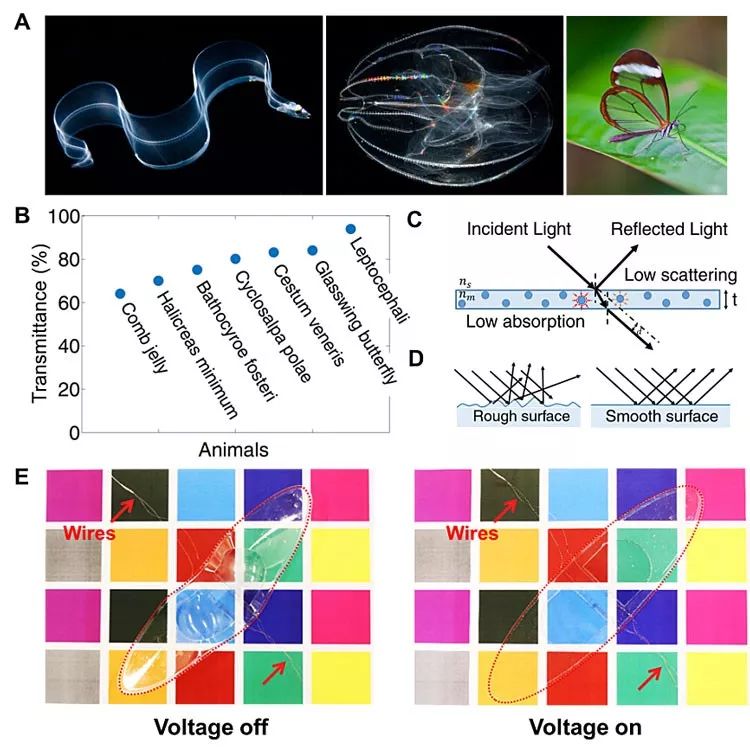
自然界利用透明来伪装的生物及可伪装柔性透明机器人。图片来源:Adv. Funct. Mater.
研究人员以聚(3,4-乙烯二氧噻吩):聚(苯乙烯磺酸)(PEDOT:PSS)和水溶性聚氨酯(WPU)复合材料作为介电弹性体驱动器的柔性固态电极,该类聚合物导电材料具有优异的弹性导电性能和高透明度,通过优化电极材料组成和介电弹性体驱动器结构开发出同时具有超大的电压诱导面积应变(200%)和高透光率(85.5%)的柔性介电弹性体驱动器,这是目前性能最佳的透明介电弹性体驱动器之一。
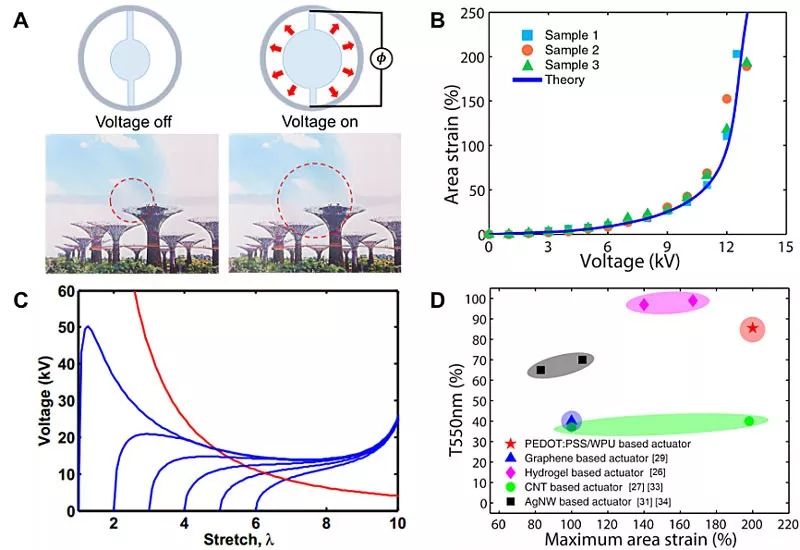
透明介电弹性体驱动器及其性能。图片来源:Adv. Funct. Mater.
以此驱动器作为人造肌肉,对软机器人进行巧妙的结构设计,可制备具有高透明性的软体机器人。通过控制驱动器的电压和频率,柔性机器人可以进行直行和旋转运动,因而可以在平面内进行任意行走。在新加坡科技研究局高性能计算研究所支持下,研究人员对机器人行走的机理进行了详细分析。
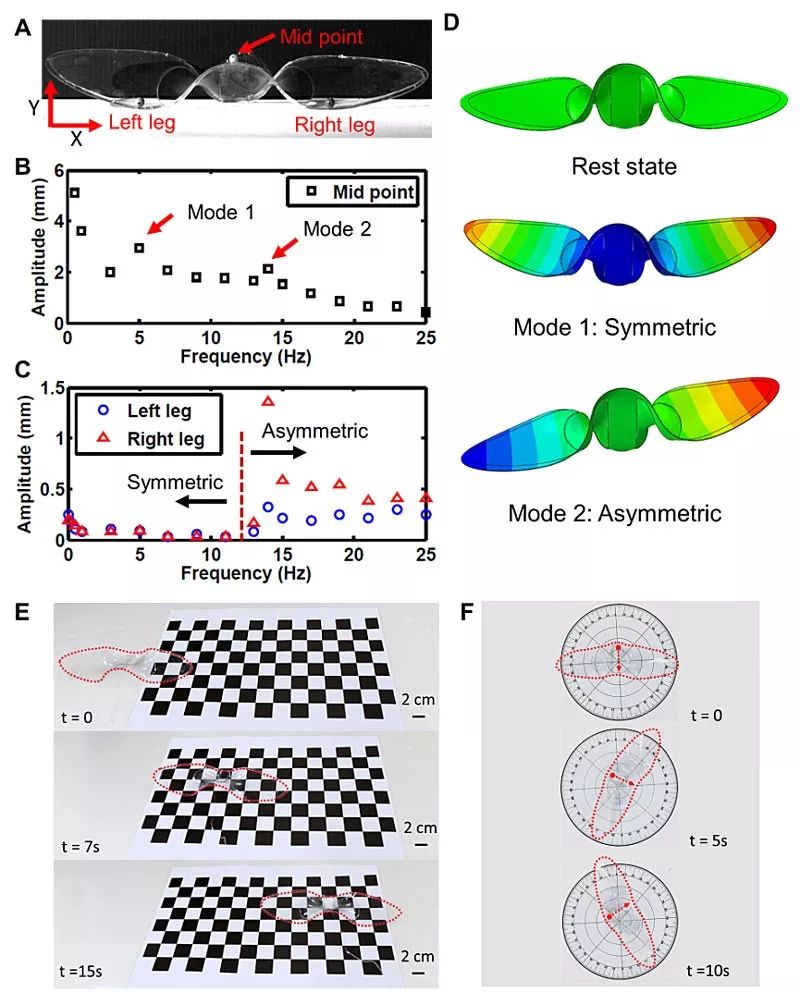
透明软体机器人行走及其机理。图片来源:Adv. Funct. Mater.
该透明软体机器人结合了弹性透明导电高分子材料和柔性驱动器的优点,实现了机器人高透明性、超薄结构及平滑表面,因而可模仿自然生物实现有效伪装,未来在战场、侦察和安全监视机器人领域具有潜在的应用。
这一成果近期发表在Advanced Functional Materials 上,论文第一作者是新加坡国立大学博士后李鹏程(现任职武汉工程大学特聘教授)、王宇哲博士和Ujjaval Gupta博士。
来源:X-molNews X一MOL资讯
原文链接:http://mp.weixin.qq.com/s?__biz=MzAwOTExNzg4Nw==&mid=2657620732&idx=4&sn=9d3a367a92d52cc6dbd793aa059bfc96&chksm=80f83b2cb78fb23a13cf227e8492520b64f0aa49eafe99178435d4032ed6be572a8ff1ac6581&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
马林看望第十七届青少年机器人竞赛北京队参赛师生



顺德区数控机械创新应用示范工程及自动化技术交流会召开
机器人造机器人,噱头or风向?

国际机器人联盟主席:征服世界的机器人

生物机器人颠覆机器人定义

机器人
机器人理财
机器人纪元

【机器人】《机器人》“空中机器人集群自主控制”专刊征文通知

【征稿】《机器人》“医疗机器人技术”专刊征稿开始啦!!!


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号