

科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
自动控制系统是由被控对象、测量变送器+调节器和执行器组成。系统的控制质量与组成系统的每一个环节的特性都有关系,特别是被控对象的特性对控制质量的影响很大,这是确定控制方案的重要依据,而各种对象又是千差万别的,因此在自动控制系统中,当我们采用一些自动化装置来构成自动控制时,首先必须深入了解对象的特性,研究它的内在规律,才能根据生产对控制质量上的要求,设计合理的控制系统,选用合适的测量变送器、调节器及执行器。在控制系统投入运行时,也要根据对象特性选择合适的调节器参数,使系统正常地运行,所以研究被控对象的特性是非常重要的。1
简介在研究对象的动态特性时,我们将被控变量看作对象的输出量,有时也叫输出参数,而将干扰作用看作对象的输入量,有时也叫输入参数。干扰作用和控制作用都是引起被控变量变化的因素。由对象的输入参数至输出参数的信号联系称之为通道;控制作用至被控变量的信号联系称为控制通道;干扰作用至被控变量的信号联系称为干扰通道。
分析被控对象的特性,就是研究对象在受到干扰作用或控制作用后,被控变量即对象的输出量是如何变化的,变化的快慢以及最终变化的数值等,因此所谓被控对象的特性,就是指对象各个输入量与输出量之间的函数关系。在被控对象特性研究中,常用放大系数、时问常数和滞后时间三个物理量来表示对象的特性,这些物理量称为对象的特性参数。
被控对象的被控变量的变化落后于干扰的现象叫滞后。滞后分为纯滞后和过渡滞后。1
纯滞后纯滞后又叫传递滞后,一般用τ0表示,它是由于物料量或能量的传送过程,需要一定的时问而造成的。例如在图1中,由于进口阀门较远,它的开度变化后,输入的物料量需要经过一段时间才能进入水箱影响液位的数值,这段时问就叫纯滞后。可见纯滞后使被控变量不能立刻随负荷的变化而变化,而要等一段时间以后,才开始变化。它是单纯地延迟了被控变量开始变化的时间,如图1所示。1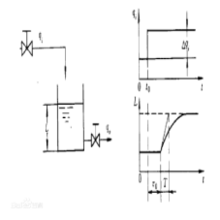
过渡滞后过渡滞后又叫容量滞后,一般用τa表示。有的对象具有两个或两个以上的容量,称为多容量对象,如夹套式蒸汽加热器、串联的液位容器等。如图2就是一个双容量对象,它的两个容量之间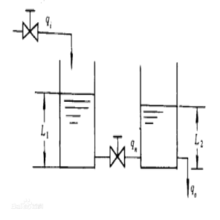 有一个阻力元件(阀门)相通。当进料阀门突然开大时,两个相联容器的液位都要变化,经过一段时问后,两个容器的液位也重新稳定下来,其动态特性曲线如图3所示.从图中可以看出,第一个容量的过渡过程与单容量对象基本相同。第二个容量的被控变量变化比较特殊,曲线上有一拐点W,W点左边变化比较快,右边变化逐渐减慢。通过W点作曲线的切线与原值相交,交点与被控变量开始变化的起点之间的时间间隔是过渡滞后τa2。1
有一个阻力元件(阀门)相通。当进料阀门突然开大时,两个相联容器的液位都要变化,经过一段时问后,两个容器的液位也重新稳定下来,其动态特性曲线如图3所示.从图中可以看出,第一个容量的过渡过程与单容量对象基本相同。第二个容量的被控变量变化比较特殊,曲线上有一拐点W,W点左边变化比较快,右边变化逐渐减慢。通过W点作曲线的切线与原值相交,交点与被控变量开始变化的起点之间的时间间隔是过渡滞后τa2。1
对象的容量系数和阻力越大,容量的个数越多,则过渡滞后时间越长,过渡过程就越慢。实际对象中,往往是纯滞后与过渡滞后同时存在,很难严格区别,常常把两者合起来统称为滞后时间τ,即τ=τ0+τa。
滞后的危害在自动控制系统中,滞后的存在是不利于控制的。因为干扰已经产生了,而检测仪表却不能及时的感受到,调节器仍然处于原来的稳定状态,它要经过一段时间后才有控制作用输出。当控制信号发出后,控制作用又不能及时地影响到对象,整个控制质量就会受到严重的影响。所以,在设计和安装控制系统时,应尽量把滞后减到最小。1
本词条内容贡献者为:
张尉 - 副教授 - 西南大学
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号