科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-12-28
来源:两江科技评论
利用不同形状的微零件,可以得到齿轮(图2)、链条(图3)和小车(图4)等不同的结构,这些结构在气泡的驱动下可以进行多种灵活的运动。
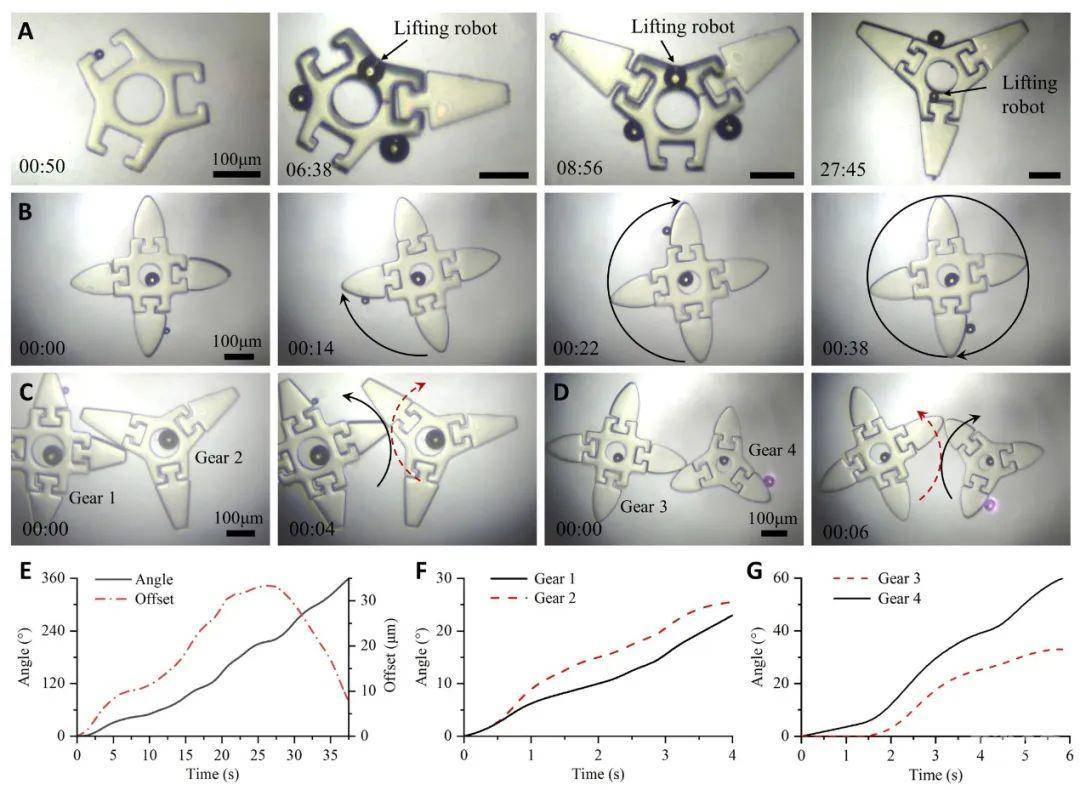
图2. 齿轮结构的装配过程及运动
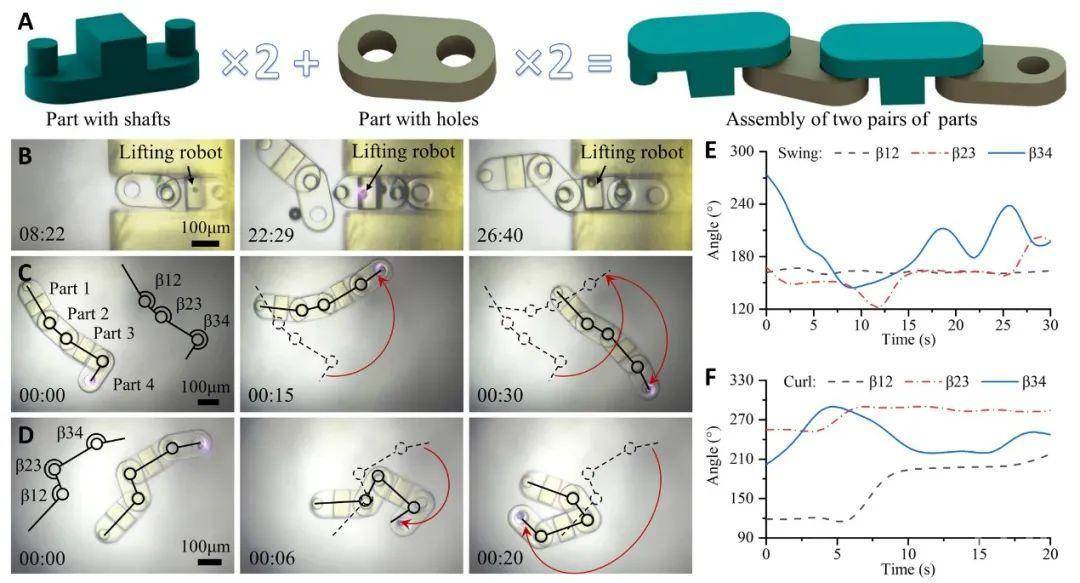
图3. 链条结构的装配过程及运动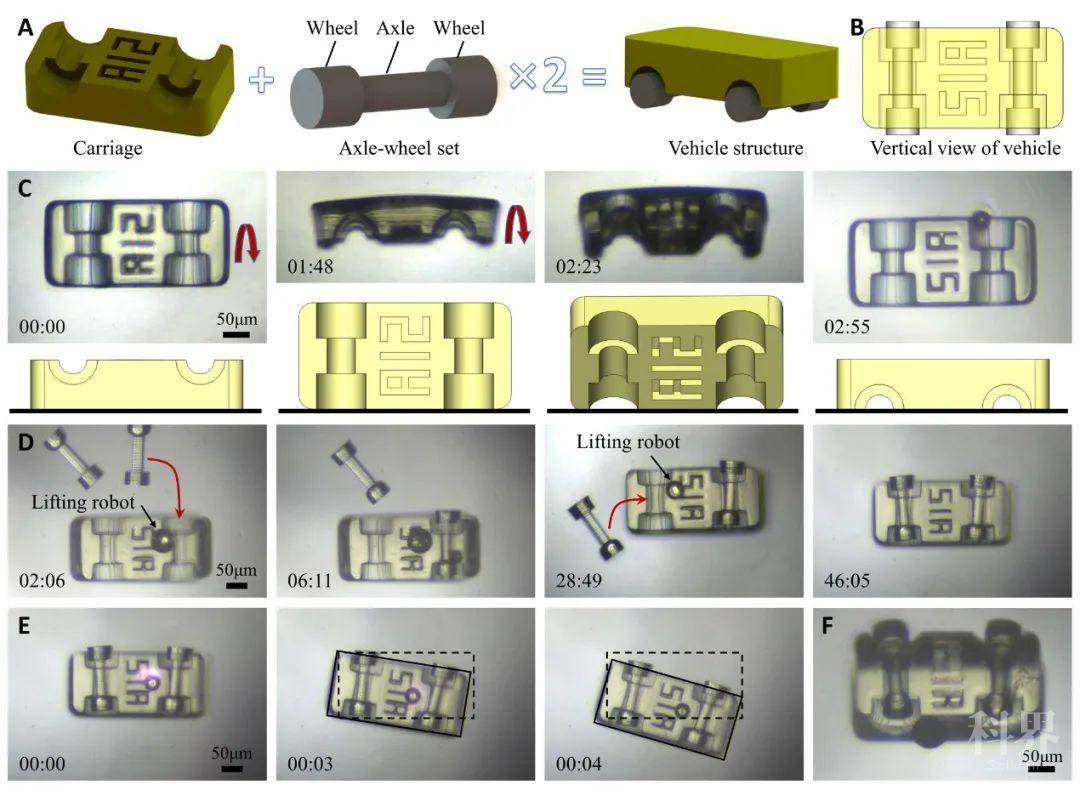
图4. 小车结构的装配过程及运动
总而言之,该研究利用微小气泡作为机器人,对微零件进行抬起、移动、固定等操作,并利用气泡机器人的三维操作能力,将多个零件装配成整体,提供了一种新的微尺度操作和装配技术。
来源:imeta-center 两江科技评论
原文链接:http://mp.weixin.qq.com/s?__biz=MzU0NDgwMjI0MQ==&mid=2247494917&idx=2&sn=3141ad8d2ab6b142d19b3078adc4378e
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

【深度】视觉+机器人,如何实现连接器的自动装配?
黄俊:用绝技护航“满分”零件

前沿 | 科学家研发出新型多足机器人,可自行组装,零件损坏时也能继续运动

视觉+机器人,如何实现连接器的自动装配?

基于机器视觉的气缸夹具零件尺寸检测研究
零件结构工艺性

利用气泡作为微型机器人实现零件的操纵和装配
解决铝零件的加工变形的常见方法
1800余名选手参加南通市教育机器人竞赛



生活废物可变成汽车零件原材料


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号