科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-12-28
来源:高分子科学前沿
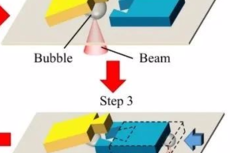
利用不同形状的微零件,可以得到齿轮(图2)、链条(图3)和小车(图4)等不同的结构,这些结构在气泡的驱动下可以进行多种灵活的运动。
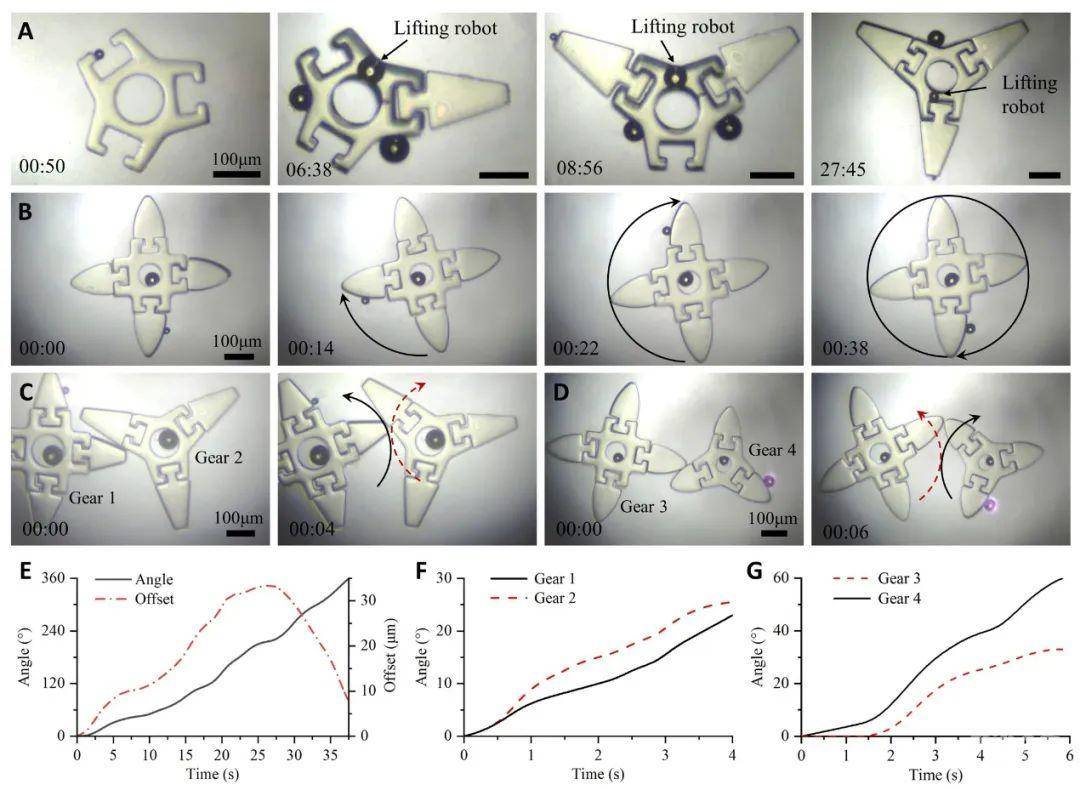
图2. 齿轮结构的装配过程及运动
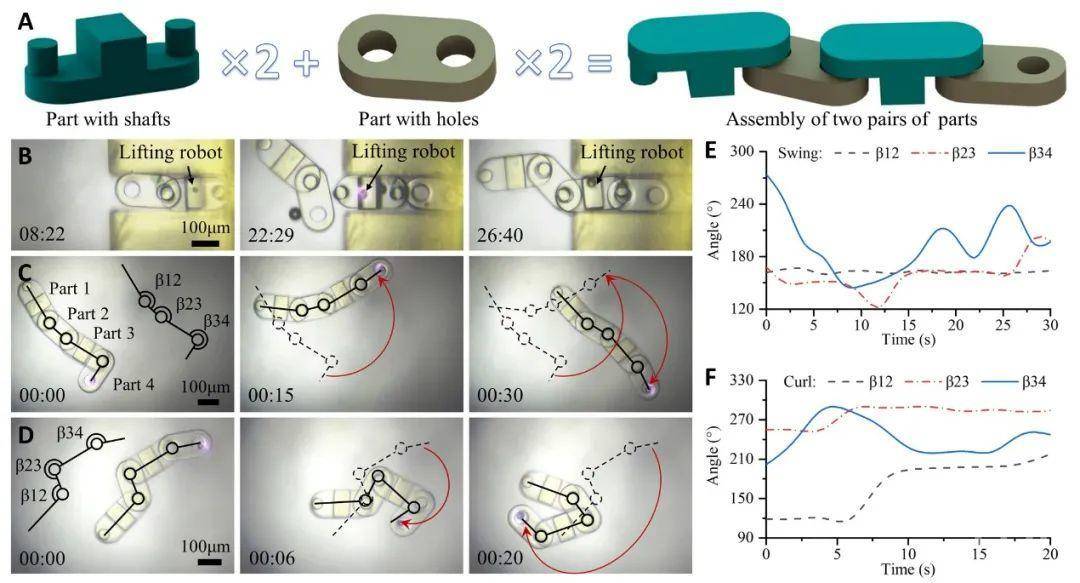
图3. 链条结构的装配过程及运动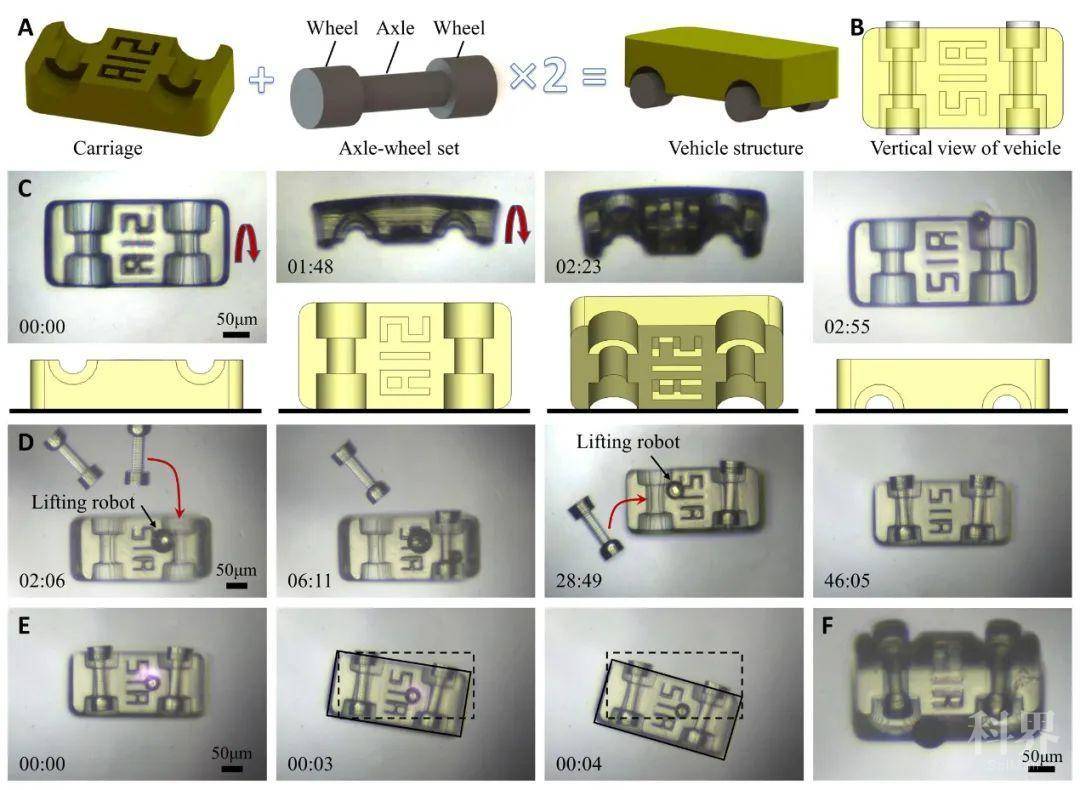
图4. 小车结构的装配过程及运动
总而言之,该研究利用微小气泡作为机器人,对微零件进行抬起、移动、固定等操作,并利用气泡机器人的三维操作能力,将多个零件装配成整体,提供了一种新的微尺度操作和装配技术。
(以上相关介绍内容由中科院沈阳自动化所微纳米机器人课题组代利国博士提供)
上述研究工作涉及的PμSL微尺度3D打印技术由摩方精密提供,因此摩方公司就这一创新型成果对中科院沈阳自动化所微纳米机器人课题组进行了更进一步的补充访谈,以下为部分内容:
1、BMF:请问利用气泡作为微型机器人来操纵微型零件有哪些优势?潜在的应用有哪些?
代博士:气泡作为微型机器人,可以对单个的零件进行多种形式的操作,特别是可以控制微模块的三维姿态,这是其相比于其他微纳操作技术的优势。其可以用于操作细胞、颗粒和微模块等,在生物医学、组织工程等领域都有应用前景。
2、BMF:请问在这次研究中,为什么采用微尺度3D打印的制备方式?
代博士:我们设计的零件包含各式各样的微米尺度接头,比如燕尾形的榫舌和卯眼等,其中最小细节尺寸30μm,并且这些结构有尺寸配合的要求。摩方公司的3D打印技术可以很好的满足我们的要求,尺寸和形状都可以按照设计进行灵活加工,误差也在可控范围内。此外,面投影光刻3D打印技术可以批量化快速制作零件,有助于实验的顺利完成。
来源:Polymer-science 高分子科学前沿
原文链接:http://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651765972&idx=3&sn=10da7872370f7e9dcc0b4ccf6f6c3f2c
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
第九届湖南省青少年机器人竞赛在株洲举行



郑志明:手工锉出“丝”级零件
1800余名选手参加南通市教育机器人竞赛


机械壳体零件修补冷焊机

机器人的“大脑”:机器人控制技术有多重要?
中科院沈阳自动化所刘连庆研究员课题组:利用气泡作为微型机器人实现零件的操纵和装配
顺德区数控机械创新应用示范工程及自动化技术交流会召开
解决铝零件的加工变形的常见方法

郑志明:手工锉出“丝”级零件

加工轴类零件需要注意这些细节


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号