科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-01-04
来源:中国指挥与控制学会
简介
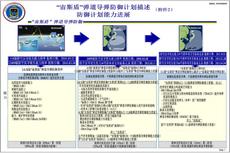
当前美海军的“宙斯盾”(AEGIS)作战系统并不具备以连贯一致地方式捕捉完整战场空间作战、环境和战术图像的全分布式监视能力。为此,美海军希望借助现有商业系统来解决其作战系统对先进态势感知(如FAA的空管系统软硬件)的需求。但目前现有商用技术无法对作战环境中的空中、水面和水下复杂对象和威胁进行实时跟踪、识别和管理,同时海军的作战系统对国防部或第三方的独立软件应用的兼容性较差。为此,美国海军正另辟蹊径,寻求开发基于人工智能软件的自主战场空间监视智能体(SABM),协助“宙斯盾”作战系统控制台操作员维持本舰责任区(AOR)内战术相关活动的态势感知能力。

美海军希望在“宙斯盾”作战系统基线10及其后续版本中加装人工智能(AI)软件智能体、通用核心作战系统(CCCS)原型作战系统以及相关的分布式通用作战图(DCOP)子系统。该人工智能软件将综合运用交战级航迹数据、不同传感器源的识别数据、从编制内/非编制数据库获取的敌平台传感器或武器能力数据,以及战场空间内各战术实体观测到的行为数据等来生成通用作战图,以此为“宙斯盾”作战系统的值班人员提供完整的态势感知能力。该子系统具有模块化特点,能够在所有参与平台内共享通用作战图,确保各平台通用作战图数据的一致性。为确保该AI软件能够在“宙斯盾”作战系统中发挥作用,必须在系统中集成分布式通用作战图,或开发合适的辅助数据搜集算法集,使AI算法能够从作战系统的现有数据源获取所需的相关数据。
1
提升“宙斯盾”系统的分布式监视能力
美海军认为,基于人工智能软件的自主战场空间监视智能体(SABM)如果在适当的通用核心作战系统生态系统软件环境中运行并能够接入分布式通用作战图或“宙斯盾”作战系统的相应数据,就能够为作战系统值班人员提供态势感知自主监控能力,将有效提高任务的成功率。SABM将利用DCOP子系统的数据执行分析监控任务,该子系统能够提供其责任区内所有战场实体的详细实时观测数据以及已知的历史参数。
人工智能技术随着深度学习算法的发展取得了非常显著的进步,这些算法也形成了包括苹果Siri、微软Cortana等一批成功的商业化AI软件产品,它们能够协助人类在尽可能短的时间内以最简洁的方式完成各种日常工作,或在特定研究领域提供助力。这种自主智能体将利用针对基于AI的新型战斗系统分析算法提高作战系统值班人员监控动态战术环境的能力。这种软件的自主性质将使其能够独立工作,而无需作战系统值班人员持续不断地手动重新配置以使其适应动态变化的战场环境。
当编制内舰艇CCCS生态系统和非编制CCCS生态系统(如其他战斗群水面平台)存在多个独立SABM智能体时,能够实现跨平台计算界限的数据交换和分析过程协调。作战系统值班人员可根据具体任务和目标配置各SABM智能体,以发现舰艇的潜在威胁,具体包括配置定制化告警服务,以及将行为特征和范式与战场空间已有实体进行匹配等方式。各SABM智能体通过与其他编制内/非编制SABM智能体协调,可自主识别并确定确定战场空间责任区内与特遣部队和战术任务相关的威胁、态势和环境状况的优先级。
SABM体系架构模型、软件框架和AI算法集将在CCCS/分布式通用作战图体系架构和软件框架中运行。
美海军要求该系统的体系架构、软件框架或AI算法必须是模块化的,采用基于开发系统的设计原则和标准,以及定义良好的软件接口。该系统的体系架构将具有可扩展性,能够在“宙斯盾”作战系统基线10及其后续版本的硬件计算环境中运行。所需算法以及托管系统也采用模块化原则,能够在CCCS生态系统作战系统应用环境以及分布式通用作战图战场态势感知系统用中运行,最终与基线10及后续版本实现集成。
2
功能和开发过程
SABM智能体的软件实现能够与CCCS原型生态系统集成,并可接入分布式通用作战图态势感知原型子系统。目标实施环境将作为独立程序在Linux(红帽RHEL7.5/Fedora 29/Ubuntu 18.4.1)处理环境中运行。在未来的演示验证环节,SABM智能体原型将展示以下能力:
1)能够监控那个战场环境分布式通用作战图,并对数据和潜在威胁进行分析;
2)能够生成舰艇和战斗群战术威胁优先级清单,识别战场空间内的战术事件;
3)为值班人员生成相关告警信息;
4)多个独立SABM智能体间能够协调,其中1台智能体托管在独立CCCS生态系统(但可联网)的单独计算平台中。
整个AI系统的开发工作将分成3个阶段进行:
第1阶段——包括体系架构模型、软件框架和基于AI的算法的概念开发,通过建模和设计需求分析确定可行性,该阶段将包括针对第2阶段原型产品的初始设计规范和能力描述。
第2阶段——设计、开发和交付SABM智能体的原型软件。在“宙斯盾”舰或未来水面战舰(FSC)主要陆上测试点进行功能测试,演示原型系统的性能指标。
第3阶段——在与“宙斯盾”硬件环境相当的陆上虚拟化硬件环境中将SABM智能体软件集成至原型作战系统中,包括“宙斯盾”基线9及后续版本和CCCS试验原型。
未来,SABM智能体软件系统还将有可能以空中交通“通用作战图”监控器的形式在商业空中交通管制系统中得到应用,用于协助用户在复杂交通管制场景中预测和避免发现撞机事件。
忻欣译自互联网
戴钰超审定
2019年12月
转自:防务快讯
投稿邮箱:liuyali@c2.org.cn
长按下方二维码 免费订阅
C2
如何加入学会
注册学会会员:
个人会员:
关注学会微信:中国指挥与控制学会(c2_china),回复“个人会员”获取入会申请表,按要求填写申请表即可,如有问题,可在公众号内进行留言。通过学会审核后方可在线进行支付宝缴纳会费。
单位会员:
关注学会微信:中国指挥与控制学会(c2_china),回复“单位会员”获取入会申请表,按要求填写申请表即可,如有问题,可在公众号内进行留言。通过学会审核后方可缴纳会费。
长按下方学会二维码,关注学会微信

来源:c2_china 中国指挥与控制学会
原文链接:https://mp.weixin.qq.com/s?__biz=MzA4ODcwOTExMQ==&mid=2655591301&idx=2&sn=2c9ddc212892f828a6c4e10c7821fba6&chksm=8b9bb91dbcec300b06401e9d8f98fe457d8595c8c8447c5e492486295817c80f7620ed5d8faa#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
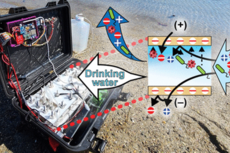
用于偏远地区的便携式海水淡化系统开发成功

习近平谈建设海洋强国
“提康德罗加”级导弹巡洋舰:以“宙斯盾”作战系统为核心的军舰

推进海洋领域军民融合深度发展

美海军陆战队航空兵计划:重新聚焦登陆作战!

基于“宙斯盾”系统的美战区级反导效能分析
美国会内参全文《宙斯盾弹道导弹防御系统》


陆基“宙斯盾”是反导保护伞吗?

美海军发布“保持海上优势规划2.0版” 规划海军未来发展

便携式海水淡化系统开发成功


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号