科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2021-08-12
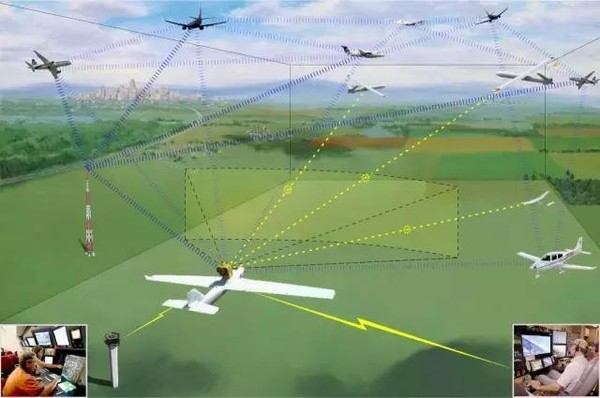
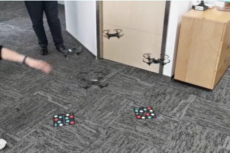
本报讯 近日,麻省理工学院的航空航天工程师在《国际机器人研究杂志》上发表了一篇论文,称其设计了一种算法,可以帮助无人机在不坠毁的情况下找到绕过障碍物的最快路线。新算法将无人机模拟飞越虚拟障碍与真实无人机在物理空间中飞过同一路程的实验数据相结合。研究人员发现,用这种算法训练的无人机通过一个简单的障碍路线比用传统规划算法训练的无人机速度快 20%。有趣的是,在整个过程中,新算法并不只是让无人机一味向前冲,在某些情况下,例如棘手的弯道,算法会让无人机减速,以保证安全或节省能源。
总体而言,使用新算法训练的无人机比传统训练的无人机在更短的时间内完成了测试内容。研究人员计划以更快的速度和更复杂的环境进行更多试验,以进一步改进他们的算法。他们还可以结合来自远程驾驶无人机的人类飞行员的飞行数据,后者的决策和机动可能有助于建立更快但仍然可行的飞行计划。(袁一雪)
来源:中国科学报
原文链接:http://news.sciencenet.cn//sbhtmlnews/2021/8/364577.shtm
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
民用干扰无人机设备
“少年科普行”带你玩转科学实验



无人机战“疫”

无人机飞行训练
Tello无人机
无人机科普:带您走进无人机世界
忘掉算法,人工智能的未来还要看硬件突破
无人机与大自然的融合——仿生无人机
候鸟无人机
IBM研发出无监督式机器学习算法


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号