科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-02-27
来源:机器人大讲堂
最近,麻省理工学院(MIT)的研究人员描述了一种配套软体传感器的系统,该系统可覆盖机器人的身体,以提供“本体感觉”,即感知其身体的运动和位置。该反馈会进入一种新颖的深度学习模型,该模型可筛选出噪声并捕获清晰的信号,以计算机器人的3D位置。目前,相关论文已发表在《IEEE机器人与自动化快报》上。

这样的软传感器是将导电硅胶片切成折纸形状,使它们具有“压阻”特性,这意味着它们在应变时会改变电阻。当传感器响应机械臂的拉伸和压缩而变形时,其电阻将转换为输出电压,然后将其用作与该运动相关的信号。
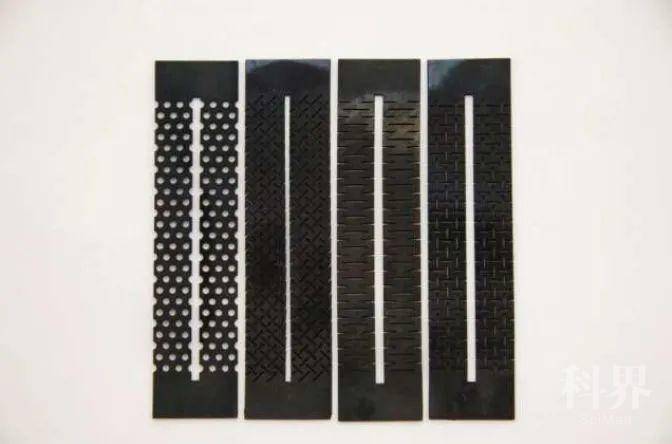
研究人员设计的机器人躯干包括三个部分,每个部分带有四个用于移动手臂的流体致动器(总共12个)。他们在每个段上融合了一个传感器,每个传感器覆盖并收集了来自软机器人中一个嵌入式执行器的数据。他们使用了“等离子键合”技术,该技术可以使一种材料的表面通电,使其与另一种材料键合。大约需要几个小时才能成型出数十个传感器,这些传感器可以使用手持式等离子结合设备结合到软机器人上。

这样的软机器人可自动摆动和伸展,并可预测自己的空间位置。研究人员表示,传统的刚性传感器会损害软机器人的自然柔韧性,使其设计和制造复杂化,并可能导致各种机械故障。因此,基于软材料的传感器是一种更合适的替代方案,但是其设计需要专门的材料和程序运行方法,这使得许多机器人实验室难以在软机器人中制造和集成它们。
“我们未来的目标之一是帮助制造出可以更加灵巧地处理和操纵环境中物体的人造肢体。”CSAIL主任Daniela Rus和电机工程与计算机科学系的Andrew and Erna Viterbi教授表示,他说:“想想人类自己的身体:您可以闭上眼睛,根据皮肤的反馈来了解世界。我们希望为软机器人设计相同的功能。”
接下来,研究人员旨在探索新的传感器设计,以提高灵敏度,并开发新的模型和深度学习方法,以减少每台新的软机器人所需的训练时间和流程。他们还希望完善系统,以更好地捕获机器人的完整动态运动。当前,该软机器人神经网络和传感器皮肤对捕捉细微运动或动态运动不敏感。但是,对于目前基于学习的软机器人控制方法而言,这是重要的第一步。
来源:RoboSpeak 机器人大讲堂
原文链接:https://mp.weixin.qq.com/s?__biz=MzI5MzE0NDUzNQ==&mid=2650220642&idx=1&sn=6b5181cf158a2981bd5d7737d73e6123&chksm=f4751adac30293ccd42baf1fe149606115f6111babee0f1e90681fdb01ac86aac6f7ce41c116#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

【WRC • 风向】2026年机器人传感器市场将突破40亿美元
沉痛悼念邱宜均教授

石墨烯传感器助力“意念控制”机器人
“制造业转型升级”论坛在深圳举行

让柔性机器人触觉更灵敏,基于颜色的传感器可模拟皮肤多重感知

机器人上的传感器

【WRC风向】给老年人的便利:鞋内传感器和移动机器人
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况
顺德区数控机械创新应用示范工程及自动化技术交流会召开

一种制造软机器人传感器的可持续策略


科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号